[Jack Qiao] wanted an autonomous robot that could be handy around an ever-changing shop. He didn’t want a robot he’d have to baby sit. If he said, ‘bring me the 100 ohm resistors’, it would go find and bring them to him.
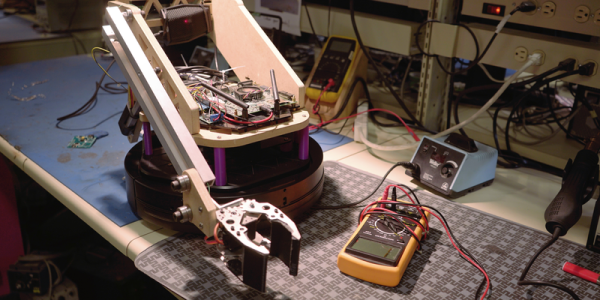
He iterated a bit, and ended up building quite a nice robot platform for under a thousand dollars. It’s got a realsense camera and a rangefinder from a Neato robotic vacuum. In addition to a mircrophone, it has a whole suite of additional sensors in its base, which is a stripped down robotic vacuum from a Korean manufacturer. A few more components come together to give it an arm and a gripper.
The thinking is done on a Nvidia Jetson TK1 board. The cores on the integrated graphics card are used to perform faster computer vision calculations. The software is all ROS based.
As can be seen in the video after the break. The robot uses SLAM techniques to successfully navigate and complete tasks such as fetch resistors, get water, and more. [Jack Qiao] is happy with his robot, and we would be too.
Continue reading “Hackaday Prize Entry: BunnyBot Helps Out All On Its Own”