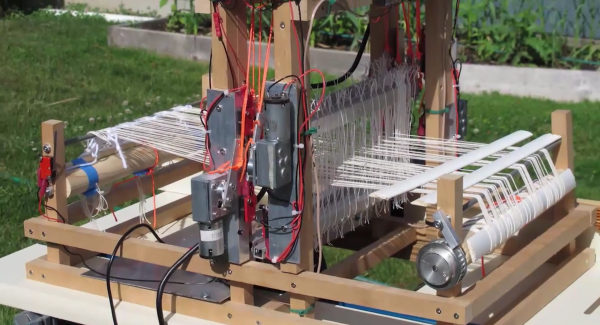
[Fred Hoefler] was challenged to finally do something with that Raspberry Pi he wouldn’t keep quiet about. So he built a machine assist loom for the hand weaver. Many older weavers simply can’t enjoy their art anymore due to the physical strain caused by the repetitive task. Since he had a Pi looking for a purpose, he also had his project.
His biggest requirement was cost. There are lots of assistive looms on the market, but the starting price for those is around ten thousand dollars. So he set the rule that nothing on the device would cost more than the mentioned single board computer. This resulted in a BOM cost for the conversion that came in well under two hundred dollars. Not bad!
The motive parts are simple cheap 12V geared motors off Amazon. He powered them using his own motor driver circuits. They get their commands from the Pi, running Python. To control the loom one can either type in commands into the shell or use the keyboard. There are also some manual switches on the loom itself.
In the end [Fred] met his design goal, and has further convinced his friends that the words Raspberry Pi are somehow involved with trouble.
Continue reading “One Man, A Raspberry Pi, And A Formerly Hand Powered Loom”