The ESP8266 is finding its way into all sorts of projects these days. It’s a capable little device, to be sure, but we’d have to say that finding it running a quadruped robot that can hop and run was a little unexpected. And to have it show up in such an adorable design was pretty cool too.
From the looks of [Javier Isabel]’s build log, he put a lot of thought into [Kame]. All the body parts and linkages are 3D printed from PLA, with the nice touch of adding a contrasting color. The legs are powered by eight high-speed Turnigy servos, and good quality bearings are used in the linkages. A NodeMCU runs the show with custom oscillator algorithms that control the various gaits, including the hopping motion. The BOM even lists “Adhesive 12mm diameter eyes” – perhaps that’s some sort of slang for the more technically correct “googly eyes.”
Built primarily as a test platform for studying different gaits, there doesn’t seem to be much in the way of sensors in [Kame]’s current incarnation. But with an ESP8266 under the hood, the possibilities for autonomous operation are good. We look forward to seeing where this project goes next. And we kid about the cuteness factor, but never doubt the power of an attractive design to get the creative juices flowing.
Remember Furby? The cute reactive robot was all the rage a few years ago, when the strange chattering creature was found under many a Christmas tree. Most Furbys have been sadly neglected since then, but the Open Furby project aims to give the toy a new lease of life, transforming it into an open source social robot platform.
We’ve featured a few Furby hacks before, such as the wonderful Furby Gurdy and the Internet connected Furby but the Open Furby project aims to create an open platform, rather than creating a specific hack. It works by replacing the brains of the Furby with a FLASH controller that runs the Robot Operating System (ROS), making the Furby much easier to program and control. They have also replaced the eyes with small OLED screens, which means it can do things like show a weather forecast, facebook notification, etc.
It is still in the early stages, but it looks like an interesting project. Personally, I am waiting for the evil Furby that wants to kill you and eat your flesh with that nasty beak…
If you own a house that was built in the 1970’s, you might still have the remnants of a home intercom system on the walls of each room. They were consider the end-all-be-all of “home automation” back in the day. Now, they look dated and out of place (but still kind of retro-cool at the same time). [Cpostier] decided that he wanted to keep his old intercom system, but give it an update with a Rasperry Pi and a 7 inch touch screen, and the results are totally groovy, man.
The original unit served two functions, as an intercom system, and also as a whole house music player. [Cpostier] wasn’t interested in the intercom feature, and so he started with the traditional gutting of the 70’s dried up electronics. Each room received a new $7 speaker (from Amazon), and the main control panel was fitted with a Pi, TFT touch screen, and new amplifier. The Pi is running Kodi (formerly know as XBMC) and along with it being a great media player, it can also show weather data, or what ever else you would like.
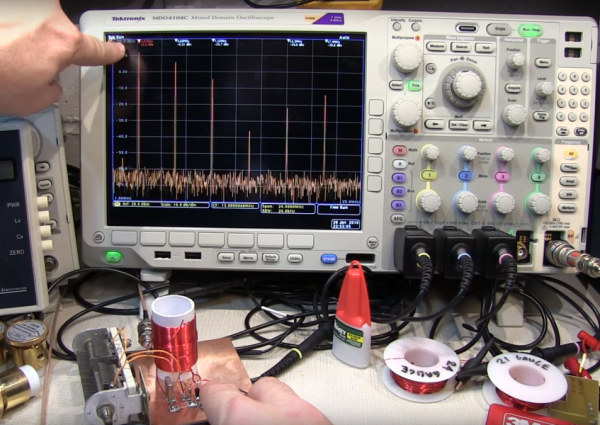
One of the best things about having your amateur radio license is that it allows you to legally build and operate transmitters. If you want to build a full-featured single-sideband rig with digital modes, have at it. But there’s a lot of fun to be had and a lot to learn from minimalist builds like this Michigan Mighty-Mite one-transistor 80-meter band transmitter.
If the MMM moniker sounds familiar, it may be because of this recent post. And in fact, [W2AEW]’s build was inspired by the same SolderSmoke blog posts that started [Paul Hodges] on the road to his breadboard and beer can build. [W2AEW]’s build is a bit sleeker, to be sure, but where the video really shines is in the exploration and improvement of the signal quality. The basic Mighty-Mite outputs a pretty dirty signal – [W2AEW]’s scope revealed 5 major harmonic spikes, and what was supposed to be a nice sine wave was full of divots and potholes. There’s only so much one transistor, a colorburst crystal and a couple of capacitors can do, so the video treats us to an explanation of the design of the low-pass filter needed to get rid of the harmonics and clean up the output into a nice solid sine wave.
If your Morse skills aren’t where they should be to take advantage of the Might-Mite’s CW-only mode, then you’ll need to look at other modulations. Maybe a tiny FM transmitter would suit your needs better?
Despite tuning my extruder steps perfectly, and getting good results instantly on larger prints. I was still having a ton of trouble with smaller parts. PLA is the favored printing material for its low odor, low warping, and decent material properties. It also has many downside, but it’s biggest, for the end user, lies in its large glass transition temperature range. Like all thermoplastics, it shrinks when it cools, but because of this large range, it stays expanded and, getting deep into my reserve of technical terms, bendy for a long time. If you don’t cool it, the plastic will pile up in its expanded state and deform.
The old cooling fan on my trusty and thoroughly battered Prusa i2.
I am working on a project that needs a tiny part, pictured above. The part on the left is what I was getting with my current cooling set-up and temperature settings. It had very little semblance with the CAD file that brought it into this world.
The bond between layers in a 3d print occurs when the plastic has freshly left the nozzle at its melting point. Almost immediately after that, the plastic crosses from the liquid state into a glass state, and like pressing two pieces of glass together, no further bonding occurs. This means that in order to get a strong bond between the print layers, the plastic has to have enough thermal mass to melt the plastic below it. Allowing the polymer chains to get cozy and hold hands. Nozzle geometry can help some, by providing a heat source to press and melt the two layer together, but for the most part, the fusing is done by the liquid plastic. This is why large diameter nozzles produce stronger parts.
What I’m getting at is that I like to run my nozzle temperature a little hotter than is exactly needed or even sensible. This tends to produce a better bond and sometimes helps prevent jamming (with a good extruder design). It also reduces accuracy and adds gloopiness. So, my first attempt to fix the problem was to perhaps consider the possibility that I was not 100% right in running my nozzle so hot, and I dropped the temperature as low as I could push it. This produced a more dimensionally accurate part, but a extraordinarily weak one. I experimented with a range of temperatures, but found that all but the lowest produced goopy parts.
After confirming that I could not get a significant return on quality by fine tuning my temperature, I reduced the speed of the nozzle by a large percentage. By reducing the speed I was able to produce the middle of the three printed parts shown in the opening image. Moving the nozzle very slowly gave the ambient air and my old cooling fan plenty of time to cool the part. However, what was previously a five minute part now took twenty minutes to print. A larger part would be a nightmare.
This will do.
So, if I can’t adjust the temperature to get what I want, and I can adjust the speed; this tells me I just need to cool the part better. The glass state of the plastic is useless to me for two reasons. One, as stated before, no bonding occurs. Two, while the plastic remains expanded and bendy, the new layer being put down is being put down in the wrong place. When the plastic shrinks to its final dimension is when I want to place the next layer. Time to solve this the traditional way: overkill.
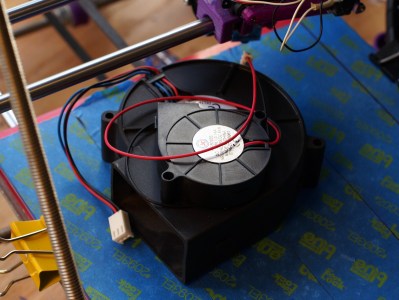
A while back my friend gifted me a little squirrel cage fan he had used with success on his 3d printer. Inspired by this, I had also scrounged a 12v, 1.7A fan from a broken Power Mac G5 power supply. When it spins up I have to be careful that it doesn’t throw itself off the table.
I should have added a rib to this bracket, this fan is heavy!
I printed out mounts for the fans. The big one got attached to the Z axis, and the little one rides behind the extruder. I fired up the gcode from before and started to print, only to find that my nozzle stopped extruding mid way. What? I soon discovered I had so much cooling that my nozzle was dropping below the 160C cold extrusion cut-off point and the firmware was stopping it from damaging itself. My heated bed also could no longer maintain a temperature higher than 59C. At this point I felt I was onto something.
I wrapped my extruder in fiberglass insulation and kapton tape, confidently turned the nozzle temperature up, set the speed to full, and clicked print. With the addition of the overkill cooling I was able to get the part shown to the right in my three example prints. This was full speed and achieved full bond. Not bad! Thus concludes this chapter in my adventures with cooling. I was really impressed by the results. Next I want to try cooling ABS as it prints. Some have reported horrible results, others pretty good ones, I’m interested. I also wonder about cooling the plastic with a liquid at a temperature just below the glass state as it is deposited. Thoughts?
Security researchers can be a grim crowd. Everything, when looked at closely enough, is insecure at some level, and this leads to a lot of pessimism in the industry. So it’s a bit of a shock to see a security report that’s filled with neither doom nor gloom.
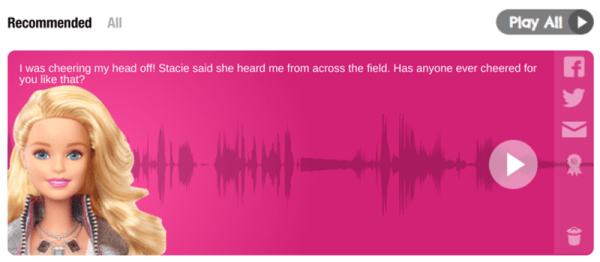
We’d previously covered Somerset Recon’s initial teardown of “Hello Barbie” and were waiting with bated breath for the firmware dump and some real reverse engineering. Well, it happened and basically everything looks alright (PDF report). The Somerset folks desoldered the chip, dumped the flash ROM, and when the IDA-dust settled, Mattel used firmware that’s similar to what everyone else uses to run Amazon cloud service agents, but aimed at the “toytalk.com” network instead. In short, it uses a tested and basically sound firmware.
The web services that the creepy talking doll connected to were another story, and were full of holes that were being actively patched throughout Somerset’s investigation, but we were only really interested in the firmware anyway, and that looked OK. Not everything is horror stories in IoT security. Some stories do have a happy ending. Barbie can sleep well tonight.
The reports of the death of the VGA connector are greatly exaggerated. Rumors of the demise of the VGA connector has been going around for a decade now, but VGA has been remarkably resiliant in the face of its impending doom; this post was written on a nine-month old laptop connected to an external monitor through the very familiar thick cable with two blue ends. VGA is a port that can still be found on the back of millions of TVs and monitors that will be shipped this year.
This year is, however, the year that VGA finally dies. After 30 years, after being depreciated by several technologies, and after it became easy to put a VGA output on everything from an eight-pin microcontroller to a Raspberry Pi, VGA has died. It’s not supported by the latest Intel chips, and it’s hard to find a motherboard with the very familiar VGA connector.