For some reason this project makes us think of the Dog Pog Grid from Neal Stephenson’s Diamond Age. It’s not that there’s a ton of drones floating around this guy, it’s that he’s got one which looks like it’s his bodyguard and is controlled by the Google Glass he wears on his head. The future is now!
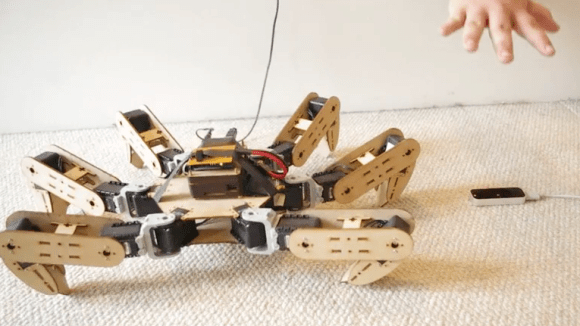
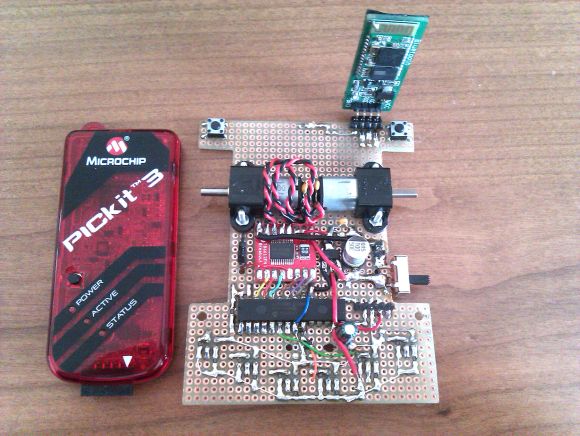
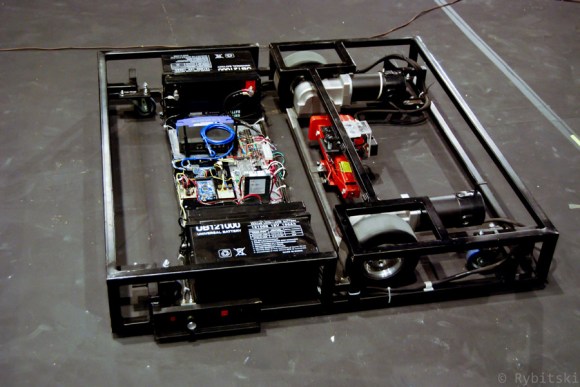
We find the metamorphosis of this project interesting as well. It started as a Leap motion controlled rover project. We saw a similar hack just the other day that paired a Leap Motion with a Hexapod. But [Blaine] wasn’t satisfied with that. Having had a taste for alternate control inputs he dug in and got to work making Google Glass the control interface. But the problem with moving your head to control a rover is that you can’t actually see it because looking down would cause unwanted motion. His solution was to transition to a quadcopter, which will hover at eye level when he’s looking right at it. Glass is sending raw sensor data to a server, which does the translation to control commands for the quadcopter.