The good [Doctor Iguana] has been working on a pair of robots which communicate with each other using mRF24J40MA wireless transceivers. This presents a challenge in debugging, as he really didn’t have an easy way of monitoring those communications. His solution was to build his own base station which lets him use a computer to monitor what each robot is saying.
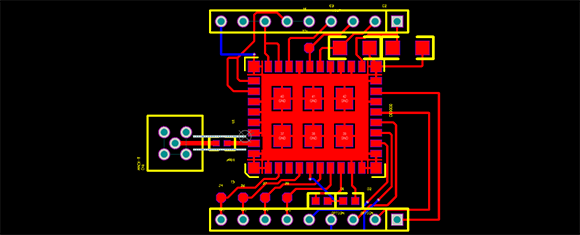
He spun his own board for the project. USB connectivity is provided by an FTDI chip, the FT232RL. This converts the USB communications in to serial for the dsPIC33 microcontroller. The FTDI chip comes with a fairly fine-pitch, but the footprint can still be fabricated using toner transfer if you’re fairly familiar with the process. [Dr. Iguana] took some close-up images of the unpopulated board which might make you a little nervous with the soldering iron. The other end of the board hosts the same Microchip wireless module as he used in his robots.
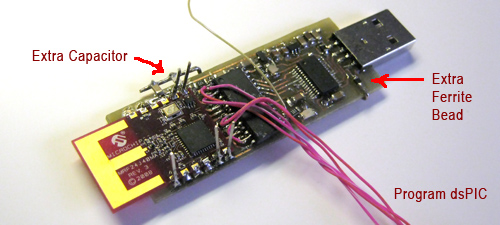
After a bit of rework (noted on the photo labels) he got this up and running. Now he can capture all of the wireless communications and see if problems are due to the sender or the receiver.
 While playing chiptunes, creating lightning, and illuminating fluorescent tubes with a homebrew Tesla coil is awesome, they’re not exactly the safest electrical devices around, and certainly aren’t easy or cheap to build. There’s another option open if you’d like to play with strong electromagnetic fields;
While playing chiptunes, creating lightning, and illuminating fluorescent tubes with a homebrew Tesla coil is awesome, they’re not exactly the safest electrical devices around, and certainly aren’t easy or cheap to build. There’s another option open if you’d like to play with strong electromagnetic fields;