Back in 1996 the 3D gaming market on PC was beginning to heat up, with hot new titles like Tomb Raider coming out that year and requiring much more graphics power than what was needed for old titles like Doom and Duke Nukem 3D to experience good graphics. Thus you had to pick some kind of 3D accelerator card to buy. Here a common joke was that of the available options, the S3 Virge GPU was so bad that it was actually worse than running in software rendering, but was this true? Cue [Bits und Bolts]’s investigation to finally put this myth to rest.
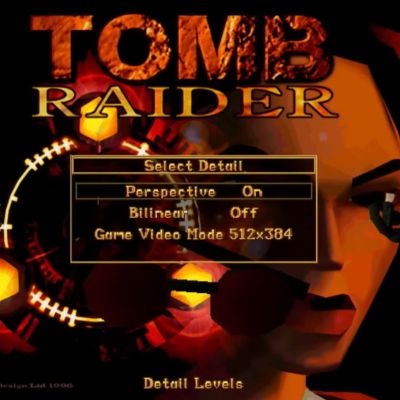
On software rendering mode a zippy Pentium 166 would struggle to render at 640×480 resolution, so if you wanted more than 320×240, or really knock down graphical fidelity, you had to get that 3D accelerator card. After combining a P166 with an S3 Virge/DX – a minor update to the original Virge – the Tomb Raider game was first compared while running in 512×384 resolution, which the game offers you with an S3 card installed along with bilinear filtering.
After hitting a capped 30 FPS on that first test, 640×480 was tried and hit a solid 15 FPS with bilinear filtering enabled, but the conclusion is basically that the special 512×384 resolution mode is pretty good. Perhaps the main causes of the myth was the wide variability in quality of the various GPUs using the S3 Virge chip, as well as trying to run at anything other than this special resolution which appears to target the card’s strengths.
Continue reading “Investigating The S3 Virge’s Reputation As A 3D Decelerator Card”