Spirals, fractals, and even bone length proportions whisper of a consistent ratio woven into the universe. Math is hidden in the fabric of things, and when this fact is observed in art, magic happens. Professor, artist, and inventor [John Edmark] draws inspiration from geometric patterns found in nature and builds sculptures using the golden ratio as a standard for design. In this project, he expresses these characteristics through animated biomorphic zoetropes.
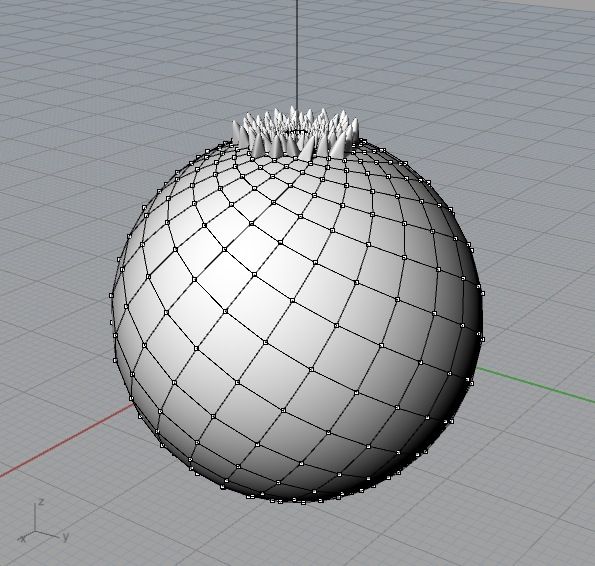 [John] modeled several 3D sculptures in Rhino containing similar geometric properties to those found in pinecones and palm tree fronds. As the segments grow from those objects in nature, they do so in approximately 137.5 degree intervals. This spacing produces a particular spiral appearance which [John] was aiming to recreate. To do so, he used a Python script which calculated a web of quads stretched over the surface of a sphere. From each of the divisions, stalk-like protrusions extend from the top center outward. Once these figures were 3D printed, they were mounted one at a time to the center of a spinning base and set to rotate at 550 RPM. A camera then films the shape as it’s in motion at a 1/2000 sec frame rate which captures stills of the object in just the right set of positions to produce the illusion that the tendrils are blooming from the top and pouring down the sides. The same effect could also be achieved with a strobe light instead of a camera.
[John] modeled several 3D sculptures in Rhino containing similar geometric properties to those found in pinecones and palm tree fronds. As the segments grow from those objects in nature, they do so in approximately 137.5 degree intervals. This spacing produces a particular spiral appearance which [John] was aiming to recreate. To do so, he used a Python script which calculated a web of quads stretched over the surface of a sphere. From each of the divisions, stalk-like protrusions extend from the top center outward. Once these figures were 3D printed, they were mounted one at a time to the center of a spinning base and set to rotate at 550 RPM. A camera then films the shape as it’s in motion at a 1/2000 sec frame rate which captures stills of the object in just the right set of positions to produce the illusion that the tendrils are blooming from the top and pouring down the sides. The same effect could also be achieved with a strobe light instead of a camera.
[John] has more information on his instructables page. He also provides a video of this trick working with an actual artichoke; one of the living examples of the golden ratio which this project was inspired by. Thank you, [Charlie Nordstrom] for helping him document these awesome sculptures and for telling us about them!
Continue reading “Animate Your Artichoke With A Lathe And Camera”

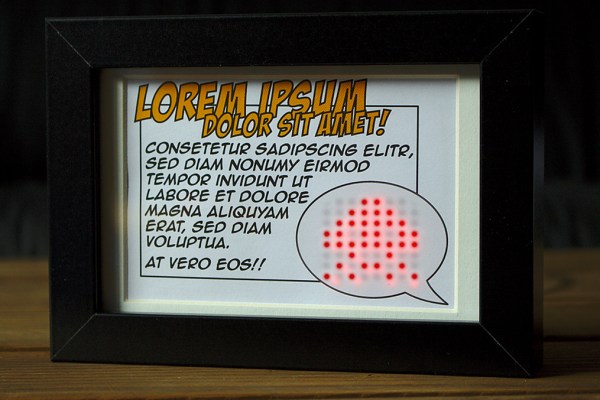
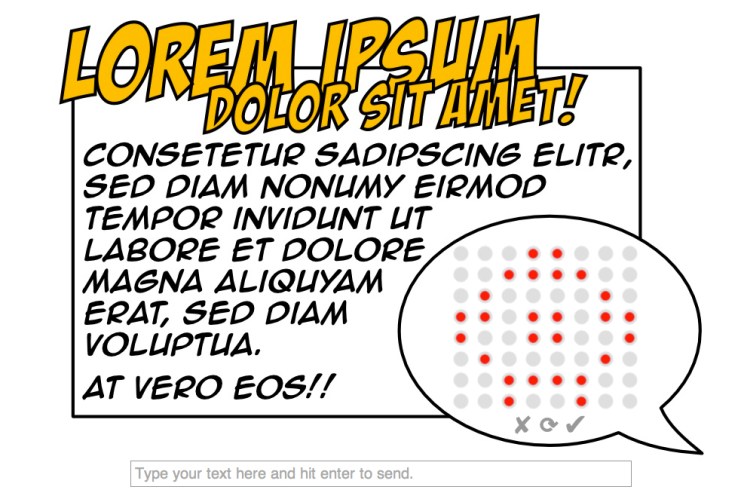



 This project is the second installment of [Studio Roosegaarde’s]
This project is the second installment of [Studio Roosegaarde’s] 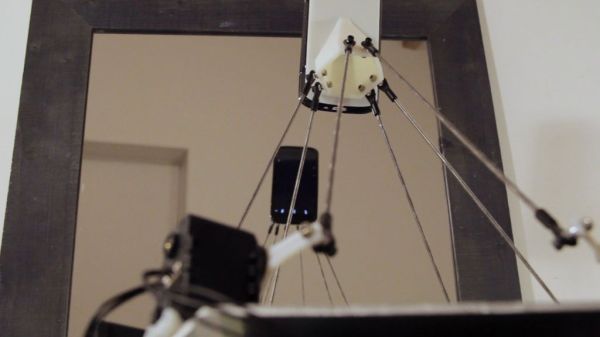
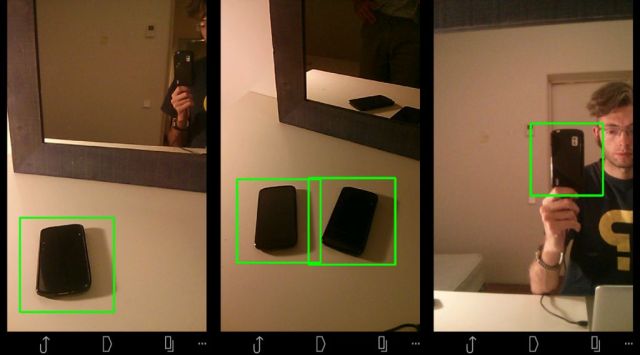 Hardware-wise, the #selfie bot is a Stewart platform made from six servo motors and a few pieces of carefully measured pushrod connected with swivel-ball-links. An android phone is mounted on the end effector which acts functionally as the robot’s face and eyes. To make it self-aware in a sense, [Ajna] and [Hersan] created their own recognition software with Open CV using a collection of sample images of various phones as reference points. As soon as the robot recognizes itself in the mirror as indicated by specific words flashing on its screen, it takes a picture, immediately uploading it to its own
Hardware-wise, the #selfie bot is a Stewart platform made from six servo motors and a few pieces of carefully measured pushrod connected with swivel-ball-links. An android phone is mounted on the end effector which acts functionally as the robot’s face and eyes. To make it self-aware in a sense, [Ajna] and [Hersan] created their own recognition software with Open CV using a collection of sample images of various phones as reference points. As soon as the robot recognizes itself in the mirror as indicated by specific words flashing on its screen, it takes a picture, immediately uploading it to its own 








