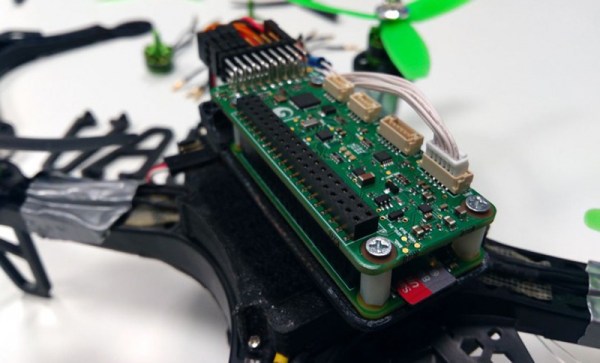
Flight controllers for quadcopters and other drones are incredible pieces of engineering. Not only do these boards keep an aircraft level, they do so while keeping the drone in one place, or reading a GPS sensor and flying it from waypoint to waypoint. The latest of these flight controllers is built on everyone’s favorite $5 computer, the Raspberry Pi Zero.
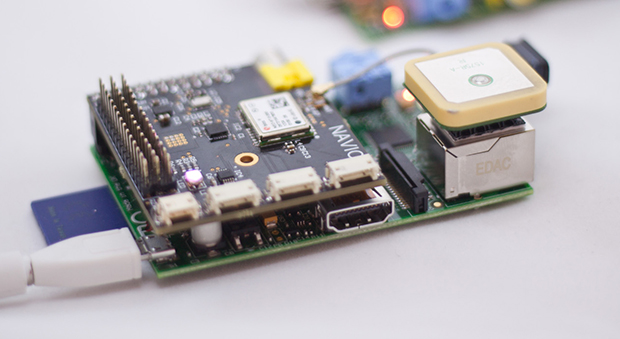
The PXFmini controller and autopilot shield is the latest project from Erle Robotics that puts eight servo outputs on the Pi, barometer and IMU sensors, a power supply, and all the adapters to turn the Raspberry Pi Zero into a capable flight controller. Since the Pi Zero will have some computational horsepower left over after keeping a quadcopter level, there’s a possibility of some very cool peripherals. Erle Robotics has been working with depth cameras and Lidar on more than a few drones. This makes for some interesting applications we can only imagine now.
The schematics for the PXFmini are open source in the best traditions of the RC and drone community and will be available soon. You can check out a video of the FXPmini flying around an office below.