
The first known use of humans using wind to perform mechanical work with machines dates back to ninth-century Persian windmills. But if we count sailing vessels among those machines, the history goes back to sometime just before the invention of written language. Since then, humans have been sailing everything from the tiniest of Sunfish to the largest of shipping vessels, and even sailing boats like canoes that aren’t typically designed for efficient sailing. For those who already own a canoe, the conversions can be straightforward but often involve drilling into the hull. This homemade conversion kit, on the other hand, requires no drilling at all.
The first, and most obvious, part of the conversion is to add a mast and sail. [Tea]’s primary setup does involve drilling a mast thwart into the gunwales of the canoe, but he also built an alternative setup which clamps to the gunwales and the bow deck instead. The standing lug sail is then hoisted on an unstayed wooden mast. The next major component of the build are a pair of leeboards which also clamp to the gunwales and function like a centerboard, and can be adjusted for one’s preferred amount of weather helm. Rounding out the stern of the boat is a custom-built rudder with a pair of lines in lieu of a tiller which can be positioned anywhere along the length of the boat.
All of the wooden parts of this build were custom-built from common lumber with finishing touches from a router to soften all of the hard edges. Canoe sailing is fairly popular, although without the leeboards these common sailing kits are often meant for downwind sailing only. A complete setup like this turns it into a much more capable craft. Without a canoe as a base vessel to start with, though, a complete sailing vessel can be built from common lumber as well.




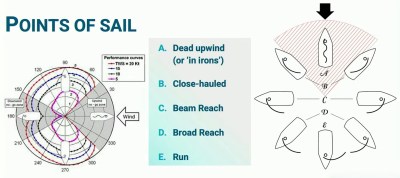 the first sails developed by humans were simple drag devices, sailors eventually developed airfoil sails that allow sailing in directions other than downwind. A
the first sails developed by humans were simple drag devices, sailors eventually developed airfoil sails that allow sailing in directions other than downwind. A 










