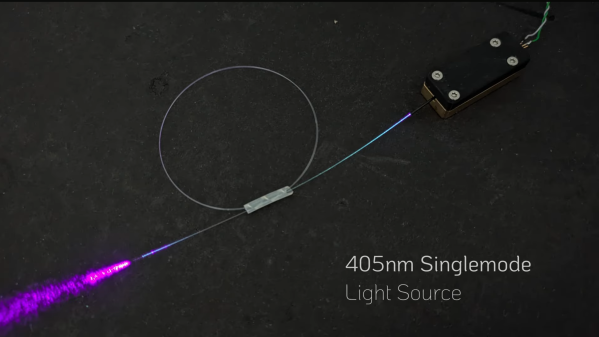
Laser diodes are convenient light sources, but for precise optical work their often-elliptical beam profile leaves something to be desired. One way to get around this is to couple the beam into a single-mode optical fiber, which then emits a circular Gaussian beam from the other end. For more advanced experiments, therefore, [Diffraction Limited] built this fiber-coupled laser source.
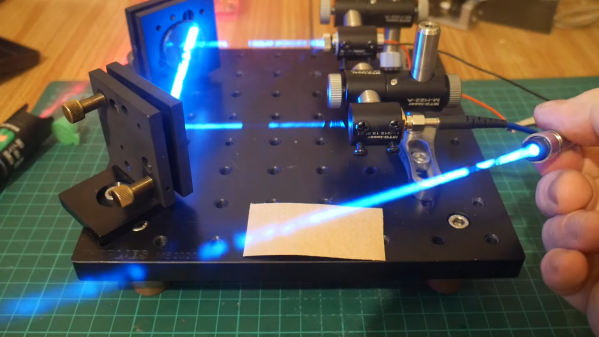
The simplest approach is to place the fiber directly against a light source, but this results in most of the light missing the three-micron fiber core. Optical fibers have an acceptance cone, and only light approaching from within this cone is coupled into the fiber. The design therefore uses an aspheric lens to focus light from the laser diode down to a tiny point matching the diameter of the fiber core, creating a cone of incoming light narrower than the acceptance cone.
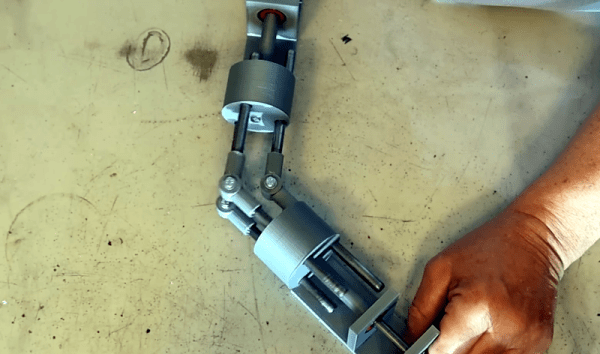
The body of the laser source was CNC machined out of brass, with the laser-diode press-fit in one end. The lens stands in front of the diode, and was glued in place so that its focal point was just above the end of a mounting pin for the glass fiber. Positioning and fixing the fiber in place was the biggest challenge; [Diffraction Limited] could use the micro-manipulator from a previous video to position the fiber, but the UV-set glue used to fix it in place shrinks during curing, pulling it out of position. To deal with this, two set screws under the mounting pin allowed its position to be adjusted slightly after gluing. As expected, adhesive shrinkage meant that the completed source initially produced no light, but after the set screws were adjusted, the beam appeared.
For more on fiber-coupled lasers, check out [Les Wright]’s work. If you don’t have access to an aspheric lens, an anti-bumping bead could be a reasonable alternative.