He explains that these days most motors are electromagnetic but suggests that may be changing as the age-old principles of electrostatics are being explored again, particularly due to the limited supply of rare-earth magnets and other materials (such as copper and steel) which are used in many electromagnetic motors.
[Ryan] says that new electrostatic motors could be the answer for highly efficient and economical motors. Conventional electromagnetic motors pass current through copper windings which create magnetic fields which are forces which can turn a rotor. The rotor generally has permanent magnets attached which are moved by the changing magnetic forces. These electromagnetic motors typically use low voltage and high current.
Electrostatic alternatives are actually an older design, dating back to the 1740s with the work of Benjamin Franklin and Andrew Gordon. These electrostatic motors generate motion through the attraction and repulsion of high voltage electric charges and demand lower current than electromagnetic motors. The high voltages involved create practical problems for engineers who need to harness this energy safely without leading to shocks or sparks or such.
[Ryan] goes on to discuss particular electrostatic motor designs and how they can deliver higher torque with lower energy losses due to friction and heat making them desirable for various applications, particularly industrial applications which demand low speed and high torque. He explains the function of the rotor and stator and says that these types of motors use 90% less copper than their electromagnetic alternatives, also no electrical steel and no permanent magnets.
Electrostatic motors are now common in MEMS applications, but researchers at the University of Wisconsin and spinoff C-Motive Technologies have brought macroscale electrostatic motors back. [via MSN/WSJ]
While the first real application of an electric motor was Ben Franklin’s electrostatically-driven turkey rotisserie, electromagnetic type motors largely supplanted the technology due to the types of materials available to engineers of the time. Newer dielectric fluids and power electronics now allow electrostatic motors to be better at some applications than their electromagnetic peers.
The main advantage of electrostatic motors is their reduced critical materials use. In particular, electrostatic motors don’t require copper windings or any rare earth magnets which are getting more expensive as demand grows for electrically-powered machines. C-Motive is initially targeting direct drive industrial applications, and the “voltage driven nature of an electrostatic machine” means they require less cooling than an electromagnetic motor. They also don’t use much if any power when stalled.
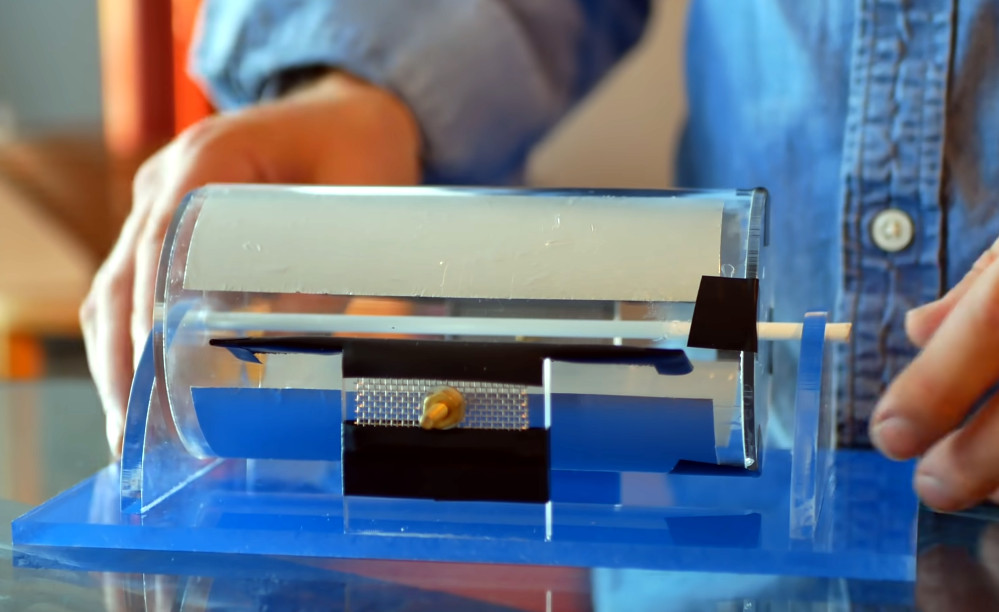
The average Hackaday user could probably piece together a rough model of a simple DC motor with what they’ve got kicking around the parts bin. We imagine some of you could even get a brushless one up and running without too much trouble. But what about an electrostatic corona motor? If your knowledge of turning high voltage into rotational energy is a bit rusty, let [Jay Bowles] show you the ropes in his latest Plasma Channel video.
Like many of his projects, this corona motor relies on a few sheets of acrylic, a handful of fasteners, and a healthy dose of physics. The actual construction and wiring of the motor is, if you’ll excuse the pun, shockingly simple. Of course part of that is due to the fact that the motor is only half the equation, you still need a high voltage source to get it running.
An earlier version of the motor ended up being too heavy.
In this case, [Jay] is revisiting his earlier experiments with atmospheric electricity to provide the necessary jolt. One side of the motor is connected to a metallic mesh electrode that’s carried 100 m into the air by a DJI Mini2 drone, while the other side is hooked up to several large nails driven into the ground.
The potential between the two gets the motor spinning, and makes for an impressive demonstration, but it’s not exactly the most practical way to experiment with your new corona motor. If you’d rather get it running on the workbench, he also shows that a more traditional high voltage source like a Van de Graaff generator will do the job nicely. As an added bonus, it can even power the device wirelessly from a few feet away.
So what can you do with a corona motor? While [Jay] is quick to explain that these sort of devices aren’t exactly known for their torque, he does show that his motor is able to lift a 45 gram weight suspended from a string. That’s frankly more power than we expected, and makes us wonder if there is some quasi-practical application for this contraption. If there is we suspect it’ll be featured in a future Plasma Channel video, so stay tuned.
If you want something to move with electricity, odds are you’ll be using magnets. Deep inside every servo, every motor, and every linear actuator is a magnet and some coils of wire. There is another way of making things move, though: electrostatics. These are usually seen in tiny MEMS devices, and now we have tiny little electrostatic speakers making their way into phones and other miniature devices.
The reason electrostatic devices are usually very small is simple: the force of any actuator is dependent on the distance between the plates and the voltage. Moving the plates closer together is right out, or else they would be touching, so the solution to building bigger electrostatic actuators is increasing the voltage. [Nathann] is doing this with a cheap boost converter that’s actually sold as a taser module. These modules are small, output about 800kV, and cost around five bucks.
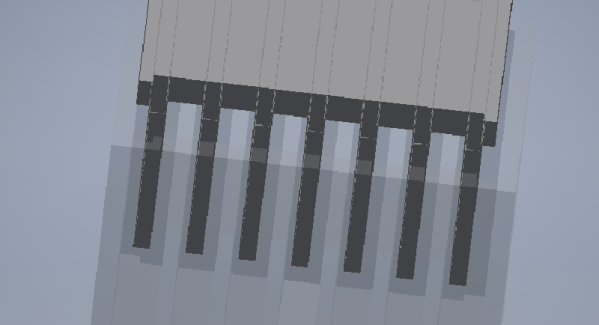
The prototype for this project is basically a 3D printed box with intersecting fins. These fins are covered in aluminum foil, and the box is filled with oil to prevent arcing. Will it work? That remains to be seen, but this project is a great example of what can be done with some creative part sourcing, a 3D printer, and a tiny bit of know-how. It’s some of the best work the Hackaday Prize has to offer, and we’re amazed that [Nathann] put in the work to make this happen.
Most of the electric motors we see these days are of the electromagnetic variety, and for good reason: they’re powerful. But there’s a type of motor that was invented before the electromagnetic one, and of which there are many variations. Those are motors that run on high voltage, and the attraction and repulsion of charge, commonly known as electrostatic motors.
Ben Franklin — whose electric experiments are most frequently associated with flying a kite in a thunderstorm — built and tested one such high-voltage motor. It wasn’t very powerful, but was good enough for him to envision using it as a rotisserie hack. Food is a powerful motivator.
What follows is a walk through the development of various types of these motors, from the earliest ion propelled ones to the induction motors which most have never heard of before, even an HV hacker such as yours truly.
Motors are everywhere; DC motors, AC motors, steppers, and a host of others. In this article, I’m going to look beyond these common devices and search out more esoteric and unusual electronic actuators that might just find a place in one of your projects. In any case, their mechanisms are interesting in their own right! Join me after the break for a survey of piezo, magnetostrictive, magnetorheological, voice coils, galvonometers, and other devices. I’d love to hear about your favorite actuators and motors too, so please comment below!
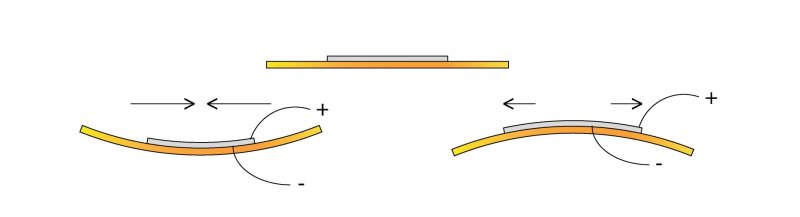
Piezoelectric materials sometimes seem magic. Apply a voltage to a piezoelectric material and it will move, as simple as that. The catch of course is that it doesn’t move very much. The piezoelectric device you’re probably most familiar with is the humble buzzer. You’d usually drive these with less than 10 volts. While a buzzer will produce a clearly audible sound you can’t really see it flexing (as it does shown above).
To gauge the motion of a buzzer I recently attempted to drive one with a 150 volt piezo driver, this resulted in a total deflection of around 0.1mm. Not very much by normal standards!
The PiezoMotor LEGS actuator “walks” along a rod, pushing it as it goes.
For some applications however resolution is of primary interest rather than range of travel. It is here that piezo actuators really shine. The poster-boy application of piezo actuators is perhaps the scanning probe microscope. These often require sub-nanometer accuracy (less than 1000th of 1000th of 1 millimeter) in order to visualize individual atoms. Piezo stacks are ideal here (though hackers have also used cheap buzzers!).
Sometimes though you need high precision over a larger range of travel. There are a number of piezo configurations that allow this. Notably Inchworm, “LEGS”, and slip-stick actuators.
The PiezoMotor LEGS actuator is shown to the above. As noted, Piezos only produce small (generally sub-millimeter) motion. Rather than using this motion directly, LEGS uses this motion to “walk” along a rod, pushing it back and forth. The rod is therefore moved, in tiny nanometer steps. However, piezos can move quickly (flexing thousands of times a second). And the LEGS (and similar Inchworm actuator) allows relatively quick, high force, and high resolution motion.
The tablecloth trick (yes this one’s fake, the kid is ok don’t worry. :))
Another type of long travel piezo actuator uses the “stick-slip phenomenon”. This is much like the tablecloth magic trick shown above. If you pull the cloth slowly there will be significant friction between the cloth and this crockery and they will be dragged along with the cloth. Pull it quickly and there will be less friction and the crockery will remain in place.
This difference between static and dynamic friction is exploited in stick-slip actuators. The basic mechanism is shown in the figure below.
Motion caused by a stick-slip motor
When extending slowing a jaw rotates a screw, but if the piezo stack is compressed quickly the screw will not return. The screw can therefore be made to rotate. By inverting the process (extending quickly, then compressing slowly) the process is reversed and the screw is turned in the opposite direction. The neat thing about this configuration is that it retains much of the piezo’s original precision. Picomotors have resolutions of around 30 nanometer over a huge range of travel, typically 25mm, they’re typically used for optical focusing and alignment and can be picked up on eBay for 100 dollars or so. Oh and they can also be used to make music. Favorites include Stairway to Heaven, and not 1 but 2 versions of Still Alive (from Portal). Obligatory Imperial March demonstration is embedded here:
There are numerous other piezo configurations, but typically they are used to provide high force, high precision motion. I document a few more over on my blog.
Magnetostrictive actuators
Magnetostriction is the tendency of a material to change shape under a magnetic field. We’ve been talking about magnetostriction quite a lot lately. However much like piezos it can also be used for high precision motion. Unlike piezos they require relatively low voltages for operation and have found niche applications.
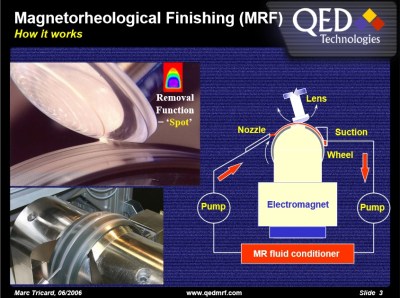
Magnetorheological motion
Magnetorheological (MR) fluids are pretty awesome! Much like ferrofluids, MR fluids respond to changes in magnetic field strength. However, unlike ferrofluids it’s their viscosity that changes.
This novel characteristic has found applications in a number of areas. In particularly the finishing of precise mirrors and lens used in semiconductor and astronomical applications. This method uses an electromagnet to change the viscosity of the slurry used to polish mirrors, removing imperfections. The Hubble telescope’s highly accurate mirrors were apparently finished using this technique (though hopefully not that mirror). You can purchase MR fluid in small quantities for a few hundred dollars.
Electrostatic motors
While magnetic motors operate through the attraction and repulsion of magnetic fields, electrostatic motors exploit the attraction and repulsion of electric change to produce motion. Electrostatic forces are orders or magnitude smaller that magnetic ones. However they do have niche applications. One such application is MEMS motors, tiny (often less than 0.01mm) sized nanofabricated motors. At these scales electromagnetic coils would be too large and specific power (power per unit volume) is more important than the magnitude of the overall force.
Voice coils and Galvanometers
The voice coil is your basic electromagnet. They’re commonly used in speakers, where an electromagnet in the cone reacts against a fixed magnet to produce motion. However voice coil like configurations are used for precise motion control elsewhere (for example to focus the lens of an optical drive, or position the read head of a hard disc drive). One of the cooler applications however is the mirror galvanometer. As the name implies the device was originally used to measure small currents. A current through a coil moved a rod to which a mirror was attached. A beam of light reflect off the mirror and on to a wall effectively created a very long pointer, amplifying the signal.
These days ammeters are far more sensitive of course, but the mirror galvanometer has found more entertaining applications:
High speed laser “galvos” are used to position a laser beam producing awesome light shows. Modern systems can position a laser beam at kilohertz speeds, rendering startling images. These systems are effectively high speed vector graphic like line drawing systems, resulting in a number of interesting algorithmic challenges. Marcan’s OpenLase framework provides a host of tools for solving these challenges effectively, and is well worth checking out.
In this article I’ve tried to highlight some interesting and lesser known techniques for creating motion in electronic systems. Most of these have niche scientific, industrial or artistic applications. But I hope they also also offer inspiration as you work on your own hacks! If you have a favorite, lesser known actuator or motor please comment below!
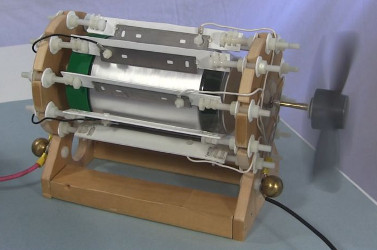
[Steven Dufresne] of Rimstar.org is at it again with another very functional science experiment. This week he’s showing us how he made a large electrostatic motor, also known as a Corona Motor.
A Corona motor makes use of a cool
phenomenon called the Corona discharge, which is the ionization of a fluid
(in this case, air) surrounding a conductor that is energized. He’s done other high voltage experiments that take advantage of this, like his Ion Wind propelled Star Trek Enterprise!
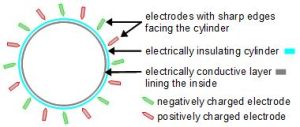
The motor works by using an even number of electrodes on the motor, each electrically charged; positive, negative, positive, negative, etc.
Because each electrode is the opposite charge, they want to repel each other — but since the cylinder is electrically insulated, the charges have no where to go — instead the cylinder begins to rotate as the charges attract back and forth — when a positive charge on the insulation meets a negatively charged electrode, the charge is removed by ionization (creating the corona effect), and the cycle continues. The direction of rotation is determined by the angle of the electrodes. The motor can get going pretty fast but doesn’t have that much torque or power.









 This novel characteristic has found applications in a number of areas. In particularly the finishing of precise mirrors and lens used in semiconductor and astronomical applications. This method uses an electromagnet to change the viscosity of the slurry used to polish mirrors, removing imperfections. The Hubble telescope’s highly accurate mirrors were apparently finished using this technique (though hopefully not
This novel characteristic has found applications in a number of areas. In particularly the finishing of precise mirrors and lens used in semiconductor and astronomical applications. This method uses an electromagnet to change the viscosity of the slurry used to polish mirrors, removing imperfections. The Hubble telescope’s highly accurate mirrors were apparently finished using this technique (though hopefully not