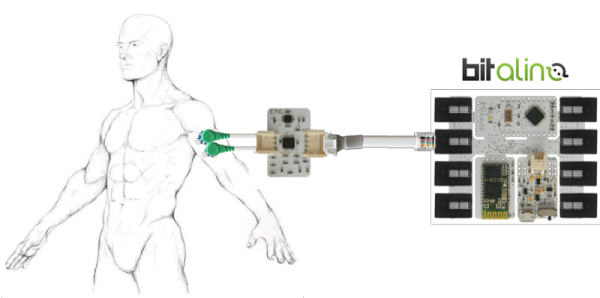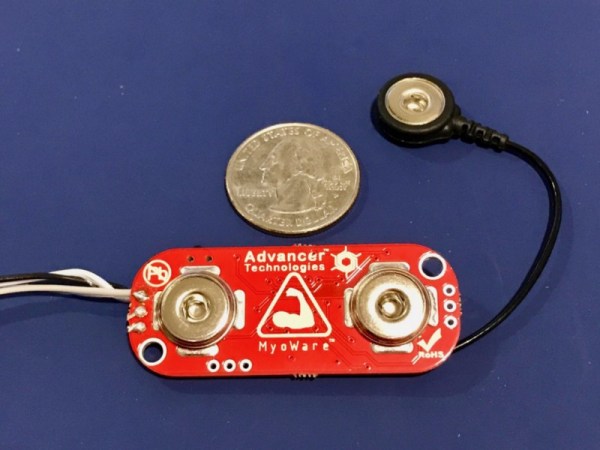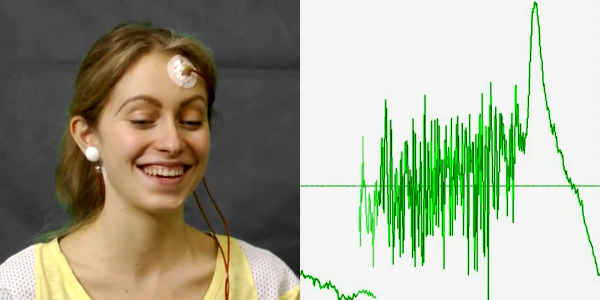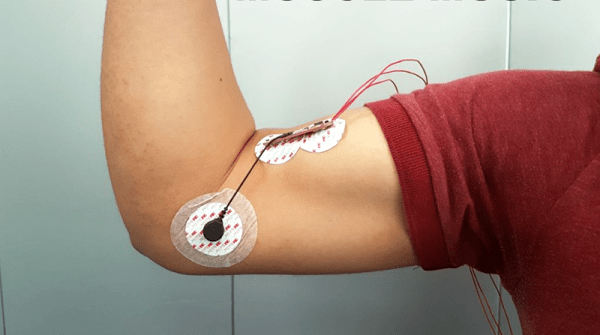
Inspired by an old Old Spice commercial, [Juliodb96] decided he too wanted to make music by flexing his muscles. An Arduino and a MyoWare sensor did the trick. However, he also tells you how to make your own sensors, if you are so inclined. You can see the instrument in action in the video below.
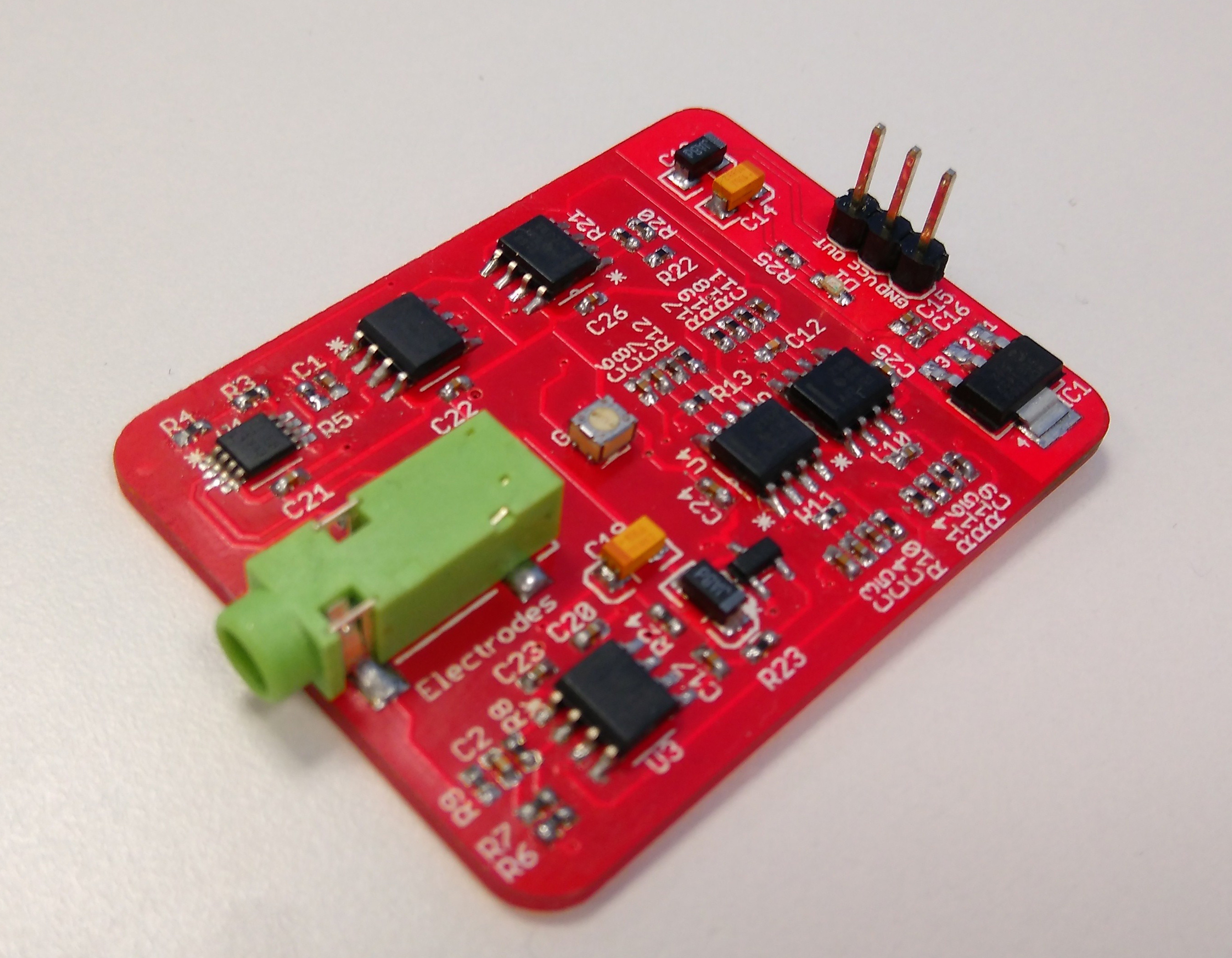
If you use the ready-made MyoWare sensors, this is a pretty easy project. You just respond to sensor input by playing some notes. If you decide to roll your own, you’ll have some circuit building ahead of you.
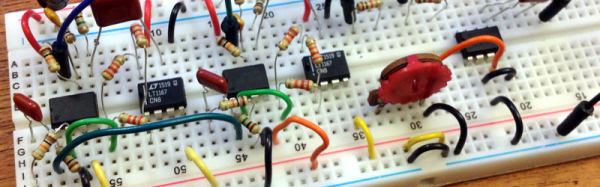
In particular, the signal conditioning for the sensors involves filtering to eliminate signals not in the 20 Hz to 300 Hz passband, several amplifiers, a rectifier, and a clipper. This requires 3 IC packages and a handful of discrete components.
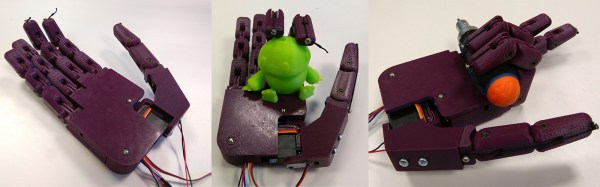
Unlike the original commercial (see the second video, below), there are no moving parts for actuating actual instruments. However, that wouldn’t be hard to add with some servo motors, air pumps, and the like. This may seem frivolous, but we had to wonder if it could be used to allow musical expression for people who could not otherwise play an instrument.
This isn’t the first time we’ve seen the MyoWare in action. We’ve even talked about signal processing that is useful for this kind of application.