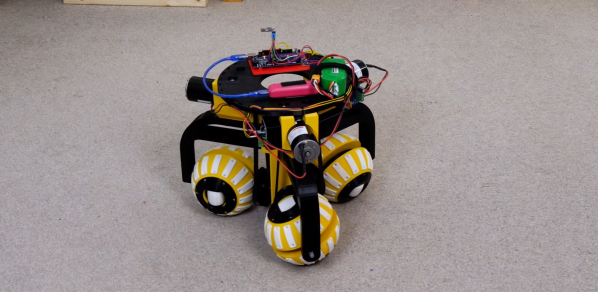
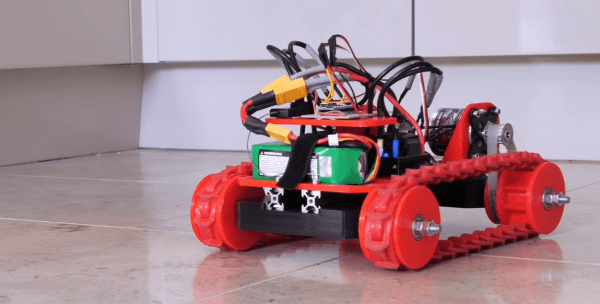
The ability to move in any direction and turn on the spot is a helpful feature on robots that operate indoors around other objects. [James Bruton] demonstrated one possible solution in the form of a robot chassis that can move in any direction with three ball-shaped wheels.
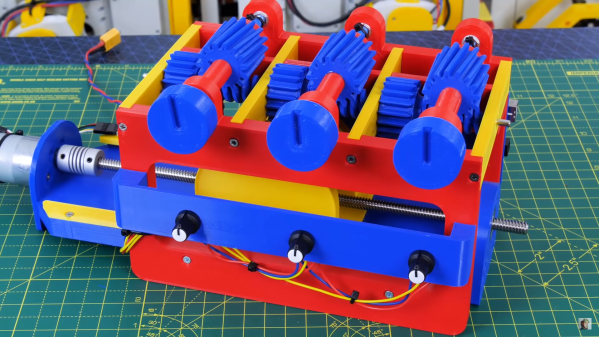
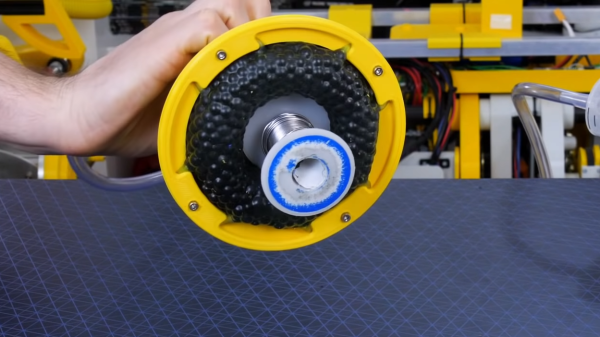
The video after the break is part two of this series. Part one covered the ball wheels themselves, consisting of a pair of half-spheres that can rotate independently with a small roller in the center of each and a driven shaft through the center of the sphere. Three of these are arranged at 120° intervals around the center of the robot, with the main shafts driven by geared DC motors using belts. To move in a straight line some basic trigonometry is used to calculate the required relative speed of each wheel. An Arduino Mega is used to do the necessary calculation when receiving input from the wireless controller.
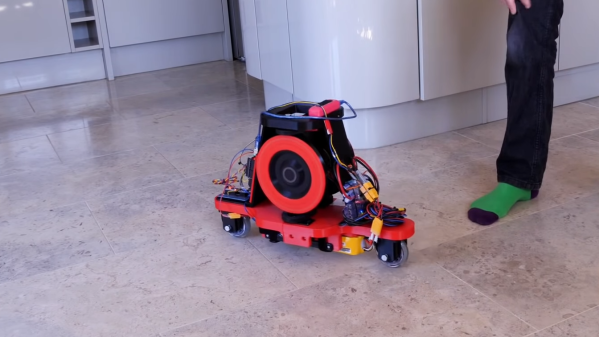
The motion is remarkably smooth, and we’d be interested to see how it compares with Mecanum and Omniwheels. It seems like the perfect platform for [James]’ Really Useful Robot. He hinted that he might mount a trash bin on it in the future. We would love to see an automatic trash-catching robot, similar to [StuffMadeHere]’s robotic basketball hoop. Continue reading “Robot Moves In Any Direction On Ball Wheels”

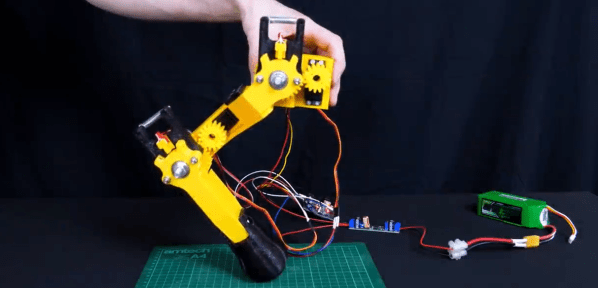
 The 3D printed leg mechanism has two joints (hip and knee), with an RC servo to drive each. To make the joints compliant, both are spring-loaded to absorb external forces, and the deflection is sensed by a hall effect sensor with moving magnets on each side. Using the inputs from the hall effect sensor, the servo can follow the deflection and return to its original position smoothly after the force dissipates. This is a simple technique but it shows a lot of promise. See the video after the break.
The 3D printed leg mechanism has two joints (hip and knee), with an RC servo to drive each. To make the joints compliant, both are spring-loaded to absorb external forces, and the deflection is sensed by a hall effect sensor with moving magnets on each side. Using the inputs from the hall effect sensor, the servo can follow the deflection and return to its original position smoothly after the force dissipates. This is a simple technique but it shows a lot of promise. See the video after the break.








