
Isolated as we are by national lockdowns and statewide stay-at-home orders, many coworkers are more connected than ever before through oddly-named productivity/chat programs such as Slack. But those notifications flying in from the sidebar all the time are are oh-so-annoying and anti-productive. Ignoring requests for your attention will only make them multiply. So how do you make the notifications bearable?
[Mr. Tom] wrote in to tell us about his solution, which involves a maneki-neko — one of those good luck cats that wave slowly and constantly thanks to a solar-powered electromagnetic pendulum. Now whenever [Mr. Tom] has an incoming message, the cat starts waving gently over on the corner of his desk. It’s enough movement to be noticeable, but not annoying.
An ESP32 inside the kitty looks at incoming messages and watches for [Mr. Tom]’s user ID, prioritizing messages where he has been mentioned directly. This kitty is smart, too. As soon as the message is dealt with, the data pin goes low again, and the cat can take a nap for a while.
The natural state of the maneki-neko is pretty interesting, as we saw in this teardown a few years back.
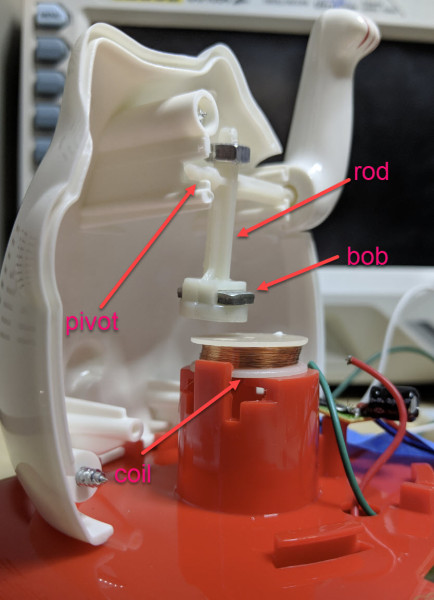 Perhaps unsurprisingly given the prevalence and cost of these devices, the answer is quite simple. The key interaction is between a permanent magnet mounted to the end of the waving arm/pendulum and a many-turn wire coil attached to the body. As the magnet swings over the coil, its movement induces a voltage. A small blob of analog circuitry reacts by running current through the coil. The end effect is that it “senses” the magnet passing by and gives it a little push to keep things moving. As long as there is light the circuit can keep pushing and the pendulum swings forever. If it happens to stop a jolt from the coil starts the pendulum swinging and the rest of the circuit takes over again. [Josh] points to a similar circuit with a
Perhaps unsurprisingly given the prevalence and cost of these devices, the answer is quite simple. The key interaction is between a permanent magnet mounted to the end of the waving arm/pendulum and a many-turn wire coil attached to the body. As the magnet swings over the coil, its movement induces a voltage. A small blob of analog circuitry reacts by running current through the coil. The end effect is that it “senses” the magnet passing by and gives it a little push to keep things moving. As long as there is light the circuit can keep pushing and the pendulum swings forever. If it happens to stop a jolt from the coil starts the pendulum swinging and the rest of the circuit takes over again. [Josh] points to a similar circuit with a 










