The massive engineering-defying Helicarrier from the Avengers is a brilliant work of CGI. Too bad it’d never actually fly… Like… Never.
Luckily, that didn’t stop our favorite RC hackers over at FliteTest from making a scale model of it — that actually works! If you’re not familiar, the Helicarrier is a fictional ship, the pride of S.H.I.E.L.D’s air force, or is it their navy.
It’s a massive aircraft carrier with four huge repulsor engines built into it, borrowing tech from Stark Industries. The shear size of it is what makes it completely ridiculous, but at the same time, it’s also unbelievably awesome.
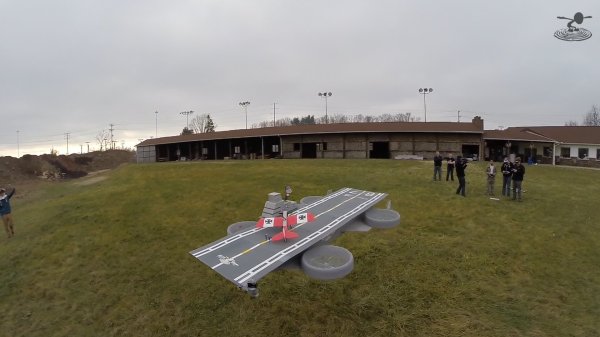
Unfortunately, repulsor technology doesn’t seem to exist yet, so the FliteTest crew had to settle with a set of 8 brushless outrunner motors, with two per “engine”. The whole thing is almost 6′ long.
It doesn’t handle that well (not surprising!) but they were able to launch another RC plane off of it, mid-flight! Landing however… well you’ll have to watch the video. Continue reading “Lego Avengers Assemble To The Helicarrier!”













