Drift cars are cool, but they’re also expensive. If you don’t have money for endless tires, fuel, and engine rebuilds, you might like to get involved at the RC scale instead. [Max Imagination] has just the build to get you started.
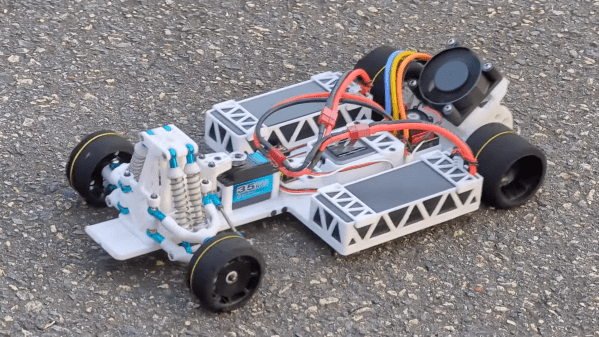
The design uses 3D printing for the majority of the chassis. Rigidity is front of mind, as is creating the right steering and suspension geometry for smooth, controllable drifts. The drivetrain is 3D-printed too, using plastic gears and universal-joint axles combined with off-the-shelf bearings. Steering is controlled via an off-the-shelf servo, with a brushless motor putting power down to all four wheels. While drifting at full scale is best achieved with rear-wheel-drive, it’s easier to control at the small scale with four driven wheels.
True to the DIY ethos, an Arduino-based RC system is used to drive the steering servo and motor speed controller, with a home-built pistol-grip controller. It also activates a small power supply which runs little humidifier modules, which turn water into a visible vapor for a fun smoke effect. It doesn’t really imitate tire smoke, since it disappears nearly the instant the car moves, but it’s still a neat effect.
It’s a neat build that makes a great starting point for your dive into RC. Meanwhile, if you’re more about speed than getting sideways, we’ve seen a homebrew RC car designed to that end as well. Video after the break. Continue reading “3D-Printed RC Drift Car Comes With Smoke Effects”