If you were a child of the 1980s whose fascination extended to the contents of your local Radio Shack store, you may remember the Armatron robot arm as a particular object of desire. It was a table top robot arm operated not by motors or a microcontroller, but by a clever set of gears directed manually from a pair of joysticks. If you took a look at it with an eye to control from your 8-bit home computer you were likely to be disappointed, but nevertheless it was an excellent toy.
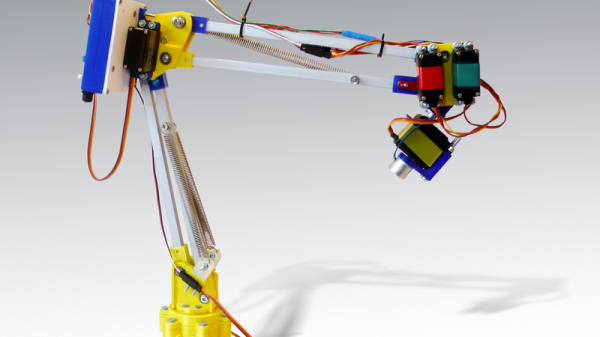
The Armatron may be long gone, but if you hanker for a similar device you should take a look at [3D Meister]’s finger controlled six axis arm. This is an arm similar to the Armatron in size, but with far more capabilities. Control is via cable loops to sliders at the arm’s base, and in addition to the usual arm movements there is an extra loop which can be used to operate any of a selection of tools including a gripper, a magnet, and a clipper. The video below the break shows the arm in action, and for the faint-hearted it should be noted that it contains the gratuitous death of some innocent plants.
Continue reading “Hackaday Prize Entry: A Six Axis Robotic Arm With Fingertip Control”