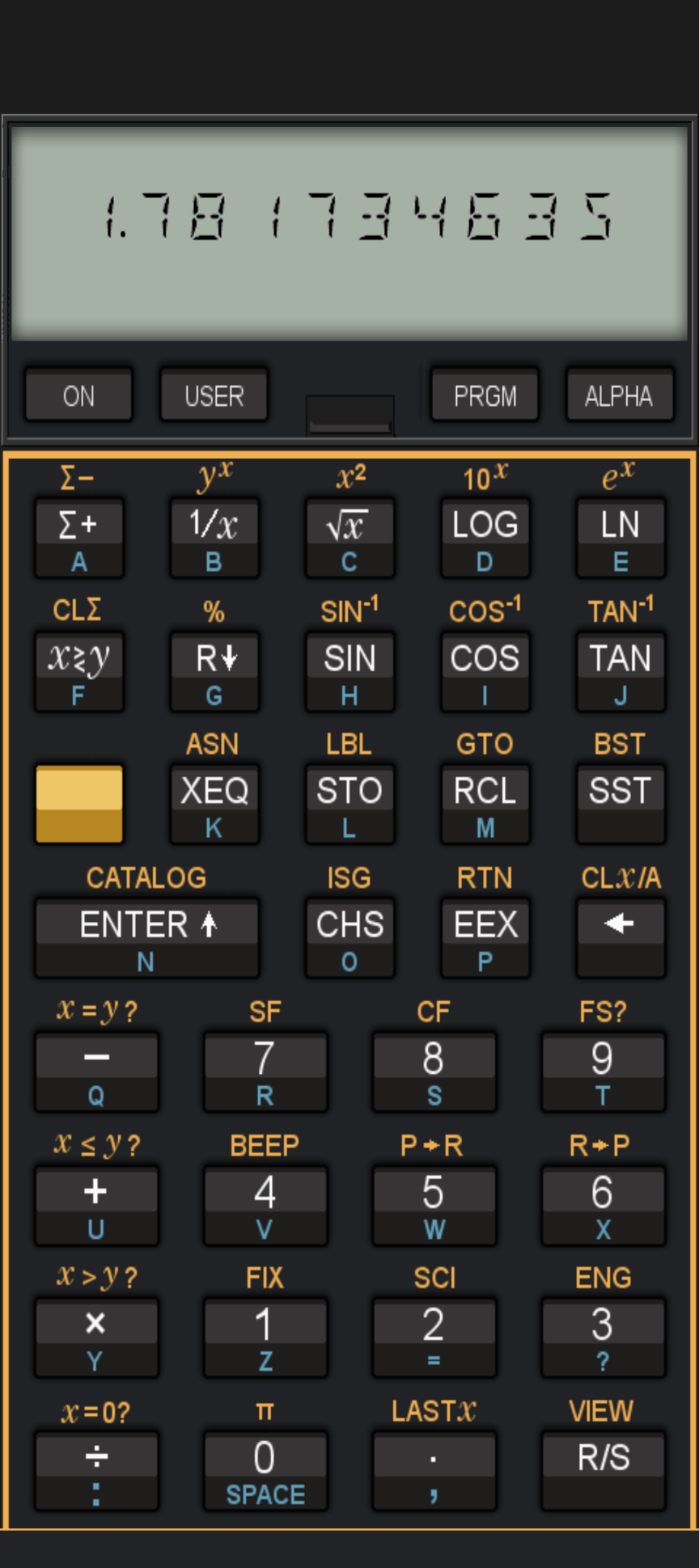
Three resistors in parallel: 4.7 k,Ω 22 kΩ, and 3.3 kΩ. Quick! What’s the equivalent value? You can estimate it, of course, but if you want the actual 1.8 kΩ (approximately) answer, you probably reached for some kind of calculating aid. I have two slide rules on my desk, and plenty more a few steps away, but I don’t use them much, honestly. I have a very old HP-41C — arguably the best calculator ever made — but I am usually afraid to use it as it is almost 50 years old and difficult to repair. I also have an HP-28S on my desk, a replica HP-41C, and a few others in desk drawers. There are also dozens of calculators on my desktop computer, my phone –including the official HP Prime app — and the web browser.
I often see newer calculators from HP, like the Prime G2, or “new” HP-like calculators like the ones from SwissMicros, and think I should pick one up. Well, technically, HP licensed their calculators to Moravia, so even a “real” HP calculator isn’t from HP anymore. But, in the end, I always realize that my need for a physical calculator is so diminished that I can’t justify buying anything new, and I can barely even spring for a $10 one at the thrift store unless it is a real collectible.
Mind you, I’m not talking about RPN versus algebraic. I could say the same thing for TI, Casio, or Sharp calculators. I just don’t know why I need one anymore, even though I still, for some strange reason, want them.
For the record, I did use an HP-41C to check the resistor math, but it was in the form of an app on my phone, not a real calculator. On the same computer I’m writing this on, I have HP-41C emulators, the Prime emulator, and a bunch of other calculators. Yet I still pick up my phone and use the familiar key layout of the HP-41C. I don’t know why. The replica 41C, unfortunately, has a landscape-oriented keyboard, so while I like it, it doesn’t satisfy my finger’s muscle memory.
Which leads to this Ask Hackaday. Do you use a calculator? Why? If you don’t, do you use a fake calculator on your phone or computer? Or do you just send your math to Google or Wolfram? I suspect some of the answer will be generational. I was in high school before calculators started showing up in schools, but they took over quickly.
There is something satisfying about having a purpose-built device to do your math. No long boot sequence. No switching apps. No messages coming in while you are typing in numbers. For the ultimate convenience, you could wear it on your wrist. The Apollo mission that docked with a Russian spacecraft carried an HP-65, and nine early Space Shuttle missions used an HP-41C. But even astronauts now don’t have a standard-issue calculator. Pilots sometimes use electronic E6Bs, but many still use the mechanical version.
Of course, I do collect slide rules, so maybe I just need to accept that calculators are yet another tech relic to collect. But someone is still buying them. I’d like to be one of them.
Continue reading “Ask Hackaday: Do We Need A 21st Century Calculator?”