A growing number of manufacturers are locking perfectly good hardware behind arbitrary software restrictions. While this ought to be a bigger controversy, people seem to keep paying for things like printers with ink subscriptions, cameras with features disabled in firmware, or routers with speed restrictions, ensuring that this practice continues. Perhaps the most blatant is car manufacturers that lock features such as heated seats or even performance upgrades in the hopes of securing a higher price for their vehicles. This might be a thing of the past for Teslas, whose software has been recently unlocked by Berlin IT researchers.
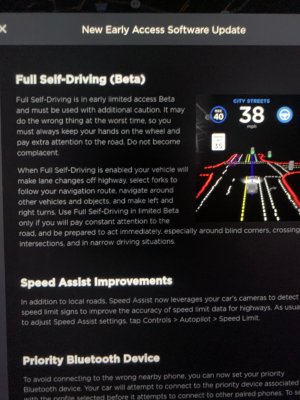
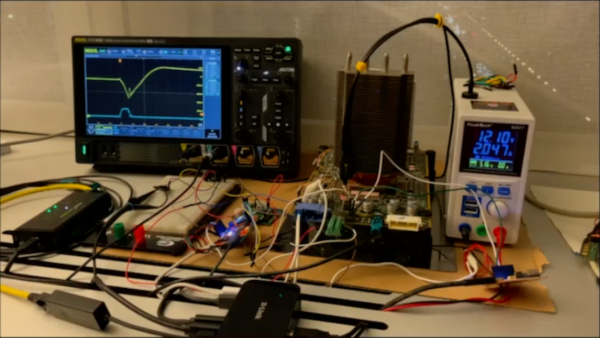
Researchers from Technische Universität Berlin were able to unlock Tesla’s driving assistant by inducing a two-microsecond voltage drop on the processor which allowed root access to the Autopilot software. Referring to this as “Elon mode” since it drops the requirement for the driver to keep their hands on the steering wheel, they were able to access the full self-driving mode allowing autonomous driving without driver input. Although this might be a bad idea based on the performance of “full self-driving” in the real world, the hack at least demonstrates a functional attack point and similar methods could provide free access to other premium features.
While the attack requires physical access to the vehicle’s computer and a well-equipped workbench, in the short term this method might allow for owners of vehicles to use hardware they own however they would like, and in the long term perhaps may make strides towards convincing manufacturers that “features as a service” isn’t a profitable strategy. Perhaps that’s optimistic, but at least for Teslas it’s been shown that they’re not exactly the most secured system on four wheels.