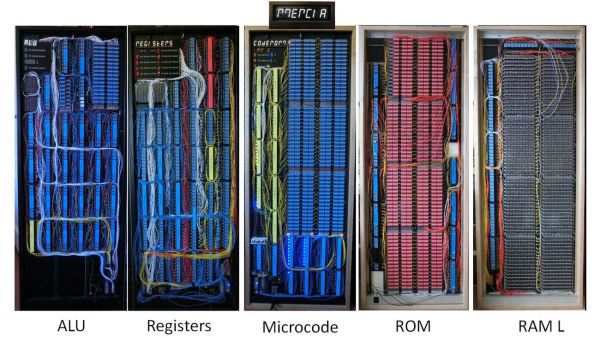
If you thought your home-brew project was taking a long time, [Jeroen Brinkman]’s MERCIA Relay Computer project probably has you beat. He began working on this impressive computer back in 2014, and has been at it ever since. In fact, the ongoing nature of the project is embedded into the name itself — the English translation of the acronym MERCIA is “My Simple Relay Computer Under Construction”. Being interested in old analog and relay computers from an early age, [Jeroen] took on this project to educate students about how computers work. The entire computer is build only using relays, diodes, and capacitors, not to mention color-coded wire based on signal functions. Using relays as the primary switching elements is at the core of his educational goal — anyone can understand how a relay works.
Understandably, this thing is big. But he has cleverly packaged it to visually show the major building blocks of a computer. While the exact size isn’t stated, we can estimate based on the photo of [Jeroen] standing next to the modules that these panels are about 1.5 m tall and perhaps 60 cm wide. The whole computer is nine panels wide, making it about 5 meters long. Except for the ROM assembly, pairs of panels are hinged together and they fold like a book and carried like a suitcases when being moved. If you enjoy the clickety-clack sound of relays, be sure to watch the relay longevity test in the video below and check out our article on the 1958 FACOM from last year.
This is a fascinating project, but unless you have a couple thousand relays laying around and a decade of free time, it’s probably better to just enjoy [Jeroen]’s work rather than build your own. We hope he releases schematics and other documentation once the project is finished. You can follow his Facebook build log if you want to keep track of the progress. Thanks to [David Gustafik] for the tip.
Continue reading “Relay Computer Consumes Six Years And 4.5 Suitcases”