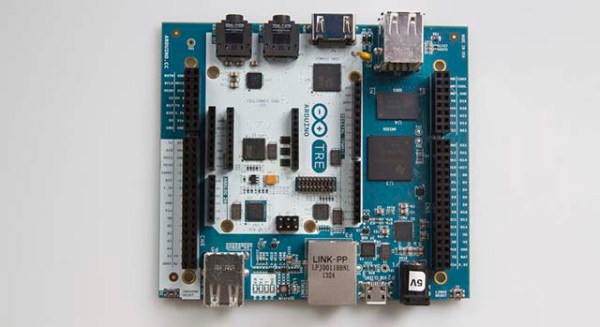
[Jason Kridner] is a member of the i3 Detroit hackerspace and during the Hackaday meet-up we were able to spend a few minutes talking about what’s going on with BeagleBoard right now. For those of you that don’t know, BeagleBoard is a non-profit foundation which guides the open hardware initiative of the same name. This includes BeagleBone which is the third iteration of the platform. [Jason’s] a good guy to talk to about this as he co-founded the organization and has been the driving force in the community ever since.
Right now the organization is participating in the Google Summer of Code. This initiative allows students to propose open source coding projects which will help move the community forward. Students with accepted proposals were paired with mentors and are paid for the quality code which is produced. One of the projects this year is a 100 Megahertz, 14-channel Logic Analyzer which [Jason] is waving around in the video. It’s the GSoC project of [Kumar Abhishek] and you can learn more from his proposal.
Also of interest in the video is a discussion about the power of the BeagleBone’s PRUs, or Programmable Real-Time Units. They’re basically unused microcontrollers that have direct access to a lot of the processor’s features and are just waiting for you to bend them to your will. Having these is a huge boon for hardware hackers. If you haven’t played with them before, check out our earlier article on what PRUs are all about and then give it a whirl yourself.
After the break there’s a brief table of contents which maps the topics shown off in the video.