Harvard University has had the flying robot insect market covered for a long time. However, their robot bee, while cool, was starting to bum them out. They wanted to put the battery and brain on the robocritter and have it fly around without a tether. Technology just wasn’t moving fast enough for them, so they’ve picked a different bug, this time a moth.
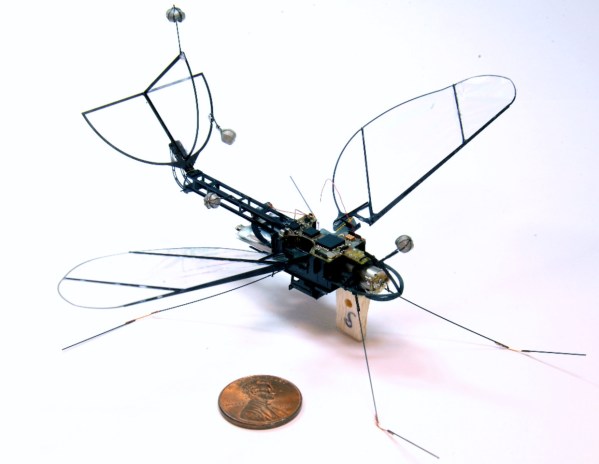
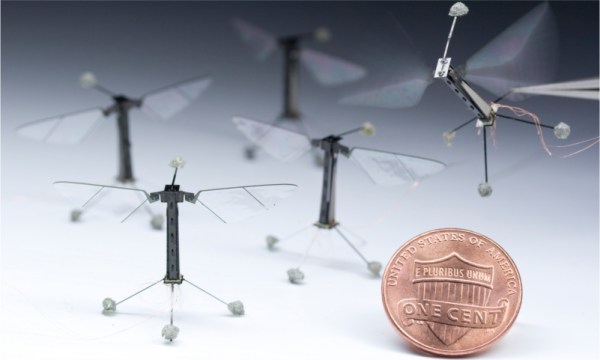
The Wyss Institute for Biologically Inspired Engineering at Harvard University is known for its Flying Winged Micro Air Vehicles or FWMAV. Which is a pretty good example of what happens when you let engineers name things. This FWMAV, weighs in at a hefty 3grams and has a 16mm wingspan. It also has propulsion, sensors, communication, brains, and power on board. Pretty impressive, the heaviest item is the motor!
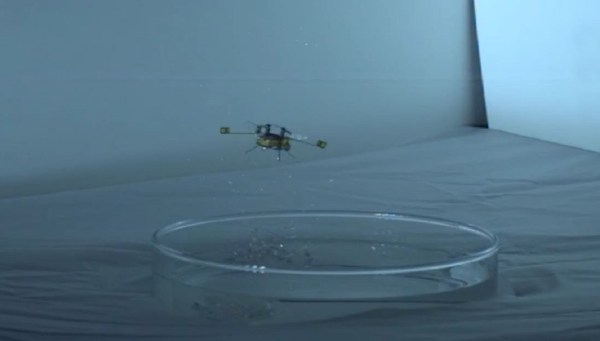
The moth can produce 4g of thrust, and they’ve shown it capable of staying aloft once launched with a small catapult. Since they’ve proven that it can at least fly, the next steps are to figure out the dynamics of moth-based flight. Right now it stays pointed in the right direction with a very tiny tail fin like on an airplane. Real moths manage this feat with independent wing control, which the robot doesn’t have yet.
It will be a while before a we’ll see robot moths bumping into our computer monitors a night, stealing our passwords, but it’s a really cool exercise in robot miniaturization.
Continue reading “Robot Moth Is Learning To Fly Like A Real Moth” →