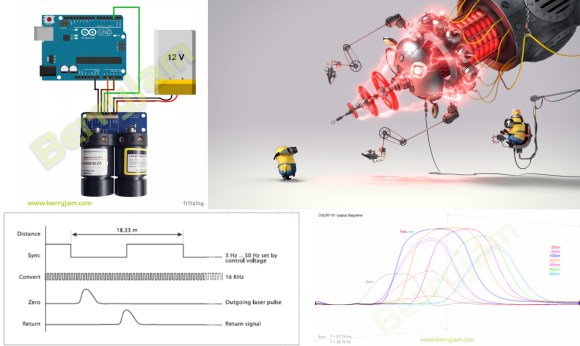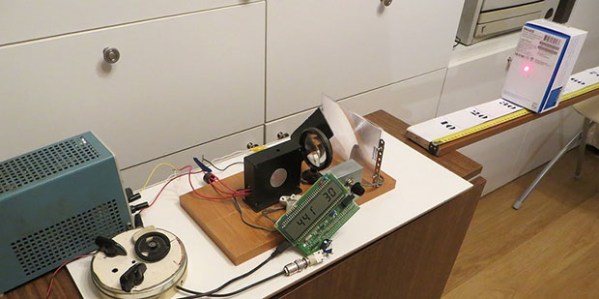
[Neumi] wrote in with a sweet robotics hack. It’s a 2D laser distance sensor (YouTube) made with a cheap line laser and an optical mouse’s flow-sensor chip used as a low-resolution camera. In one sense, it’s a standard laser-distance-sensor project. But it is clever for a whole bunch of reasons.

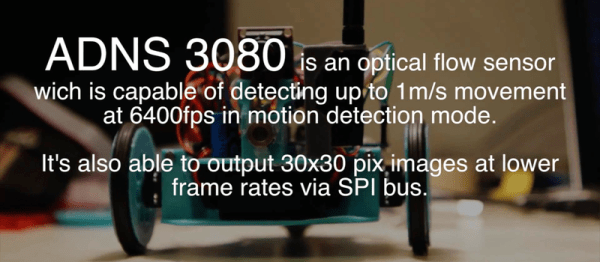
For one, using a mouse sensor as a low-res camera is awesome. It’s designed to read from a standard red LED, so the sensitivity is in just the right ballpark for use with a line laser. It returns a 30×30 pixel greyscale image, which is just about the right amount of data for a low-end microcontroller to handle and keep up with the framerate without resorting to coding tricks.
It’s also no coincidence that these sensors are available with lenses built in, for relatively cheap, on eBay. Apparently the quadcopter gurus use them as if they were mice to visually track their quad’s motion. Hacker spillover!
Detecting the laser line as it reflects off of whatever objects are lying on [Neumi]’s floor could also possibly prove difficult, and might produce false readings in the presence of background illumination. So [Neumi] takes two readings with the camera — one with the laser on and one with it off — and differences them. Done fast enough, this should reduce any non-laser sources down to the sensor’s noise floor. Finally, there’s some thresholding and averaging going on behind the scenes that help make everything work out right. The code is up on GitHub.
Not a bad build for a 2D laser distance system on a budget. If you want to shell out a bit more money, and are into a seriously involved build, this is probably the slickest we’ve seen in a long time. And if you’re thinking that you’ve heard of [Neumi] before, you’re right: we featured this 405mm laser PCB exposer / burner CNC machine just a few months ago.
Continue reading “Mouse Brains Plus Line Laser Equals Rangefinder”
 In the late 1800s, no one knew what light was. Everyone knew it behaved like a wave some of the time, but all waves need to travel through some propagation medium. This propagation medium was called the luminiferous aether and an attempt to detect and quantify this aether led to one of the coolest experimental setups of all time: the Michelson-Morely experiment. It was a huge interferometer mounted on a gigantic slab of marble floating in a pool of mercury. By rotating the interferometer, Michelson and Morely expected to see a small phase shift in the interferometer, both confirming the existence of a luminiferous aether and giving them how fast the Earth moved through this medium.
In the late 1800s, no one knew what light was. Everyone knew it behaved like a wave some of the time, but all waves need to travel through some propagation medium. This propagation medium was called the luminiferous aether and an attempt to detect and quantify this aether led to one of the coolest experimental setups of all time: the Michelson-Morely experiment. It was a huge interferometer mounted on a gigantic slab of marble floating in a pool of mercury. By rotating the interferometer, Michelson and Morely expected to see a small phase shift in the interferometer, both confirming the existence of a luminiferous aether and giving them how fast the Earth moved through this medium.