Making machines go fast has always been a seemingly unavoidable impulse for humans. With the advent of radio control, it’s possible to get a taste of the rush without putting your life and too much money on the line. In the spirit of speed, [James Whomsley] strapped a jet turbine engine to an RC car, and learned some hard lessons along the way.
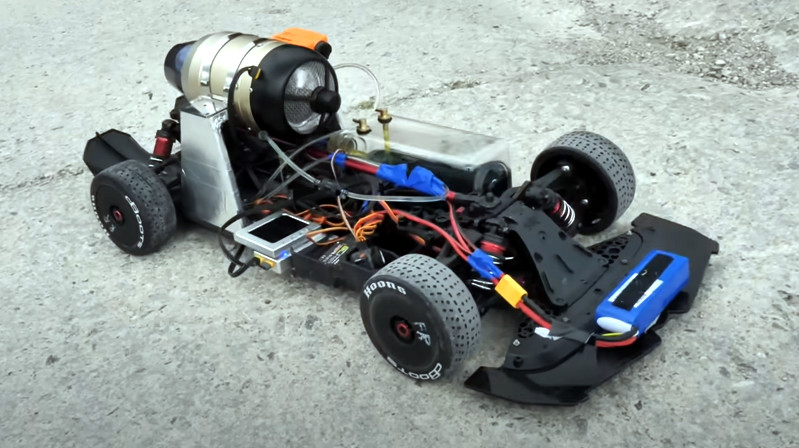
The car started as a four-wheel drive electric race car, but [James] removed most of the drive train components and mounted the jet turbine engine on a pair of 3D printed struts. Originally intended for large-scale RC planes, the little jet engine produces about 120 N of thrust. To allow the car to stop, [James] kept the drive shafts and connected them to a centrally mounted disk brake unit.
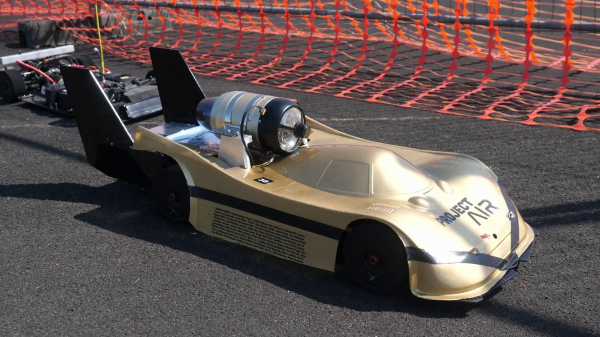
 For the first high-speed test runs, James added a vacuum-formed shell and a pair of large vertical stabilizers for high-speed stability. On the 3rd test run at a local racetrack, the car got up to 190 km/h (118 MPH) before it veered off the track and crashed. Fortunately, the chassis and engine only sustained minor damage and were easy to repair.
For the first high-speed test runs, James added a vacuum-formed shell and a pair of large vertical stabilizers for high-speed stability. On the 3rd test run at a local racetrack, the car got up to 190 km/h (118 MPH) before it veered off the track and crashed. Fortunately, the chassis and engine only sustained minor damage and were easy to repair.
James rebuilt the car with a lower engine to reduce the center of gravity and added an electronic gyro in an attempt to stabilize the car at high speed. Time ran out, and he wasn’t able to test the car before taking it to a high-speed RC event held on a runway. This led to another crash when the car again veered off the track after badly oscillating. After checking the onboard footage, [James] discovered the receiver had experienced a loss of signal, and an incorrect fail-safe setting made the engine go full throttle. After more tests, James also found that excessive play in the steering mechanism had caused the gyro to induce oscillations.
Although this car failed in the end, [James] intends to take the lessons learned into a new high-speed car build. [rctestflight] also did some testing with an EDF-powered RC car recently, and used a drone flight controller for high speed stability. This is not [James]’ first foray into speed machines, having previously experimented with a rocket plane.

















