You no doubt recall the incredible Apollo Guidance Computer (AGC) reverse engineering and restoration project featured on the CuriousMarc YouTube channel a few years ago. Well, [Marc] and the team are at it again, this time restoring the Apollo Unified S-Band tracking and communication system flight hardware. As always, the project is well documented, carefully explained, full of problems, and is proceeding slowly despite the lack of documentation.
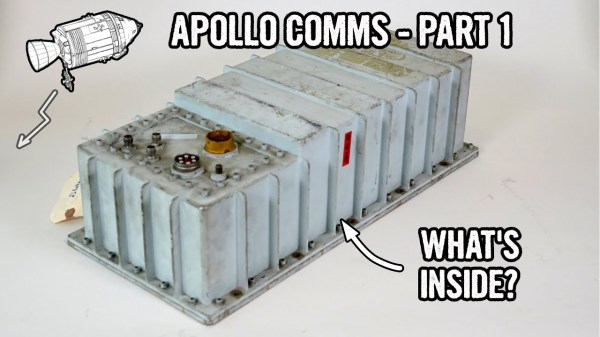
Like the guidance computer, the Unified S-Band system was pretty innovative for its day — able to track, provide voice communications, receive television signals, and send commands to and monitor the health of the spacecraft via telemetry. The system operates on three frequencies, an uplink containing ranging code, voice and data. There are two downlinks, one providing ranging, voice, and telemetry, the other used for television and the playback of recorded data. All crammed into two hefty boxes totaling 29 kg.
So far, [Marc] has released part 9 of the series (for reference, the Apollo Guidance Computer took 27 parts plus 8 auxiliary videos). There seems to be even less documentation for this equipment than the AGC, although miraculously the guys keep uncovering more and more as things progress. Also random pieces of essential ground test hardware keep coming out of the woodwork. It’s a fascinating dive into not only the system itself, but the design and construction techniques of the era. Be sure to check out the series (part 1 is below the break) and follow along as they bring this system back to life. [Marc] is posting various documents related to the project on his website. And if you missed the AGC project, here’s the playlist of videos, and the team joined us for a Hackaday Chat back in 2020.