Earlier this year [Skyhawkson] got ahold of an Apollo-era printed circuit board which he believes was used in a NASA test stand. He took high quality photos of both sides of the board and superimposed them atop each other. After digging into a few obsolete parts from the 1960s, he was able to trace out the connections. I ran across the project just after making schematics for the Supercon badge and petal matrix. Being on a roll, I decided to take [Skyhawkson]’s work as a starting point and create KiCad schematics. Hopefully we can figure out what this circuit board does along the way.
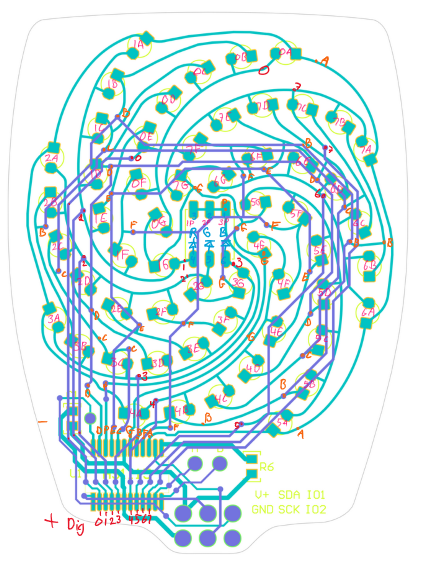
The board is pretty simple:
- approximately 6.5 x 4.5 inches
- 22 circuit edge connector 0.156 in pitch
- 31 ea two-terminal parts ( resistors, diodes )
- 3 ea trimmer potentiometers
- 7 ea transistors
- parts arranged in 4 columns
Continue reading “Apollo-era PCB Reverse Engineering To KiCad”