Force feedback took off in a big way in the late 90s, bringing a sense of realism to flight sticks and racing wheels that hadn’t been there before. Its cheaper haptic cousin was rumble feedback via vibration motors, which does add a little something but it’s more an idea of a feeling than anything relevant to real life. It’s also usually pretty weak, but [teenenggr] has a way around that.
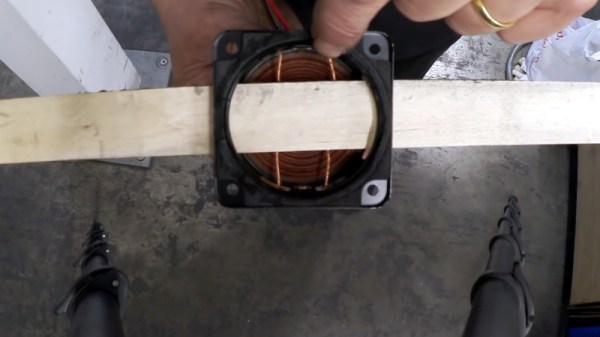
The build takes a regular Playstation controller, and disconnects the internal rumble motors. The controller’s motor output is instead linked to an Arduino Uno’s digital input. When the Arduino detects the rumble motor signal switching on, it turns on a relay, supplying power to a hefty one horsepower induction motor, fitted with an eccentric weight.
What happens next is pure chaos. Essentially equivalent to throwing a brick in a washing machine, the motor shakes the entire desk at the slightest hint of rumble signals from the gain. Sustained vibration commands, such as when firing machine guns in Crysis, flung [teenenggr]’s monitor from the desk. Even with it taped down, game play quickly became impossible as he inadvertently hits ALT-Tab and leaves the game while trying to hang on to the desk for dear life.
Is it a useful hack? No, but it would make an excellent prank if bolted underneath your friend’s gaming rig for a laugh. With that said, the intense vibration probably won’t do any good for mechanical hard drives, anything with edge connectors, or just their computer in general. It’s a big step up from the last [teenenggr] project we featured – a rumble feedback mouse. Video after the break.
Continue reading “Gaming With 1 Horsepower Of Rumble Feedback”