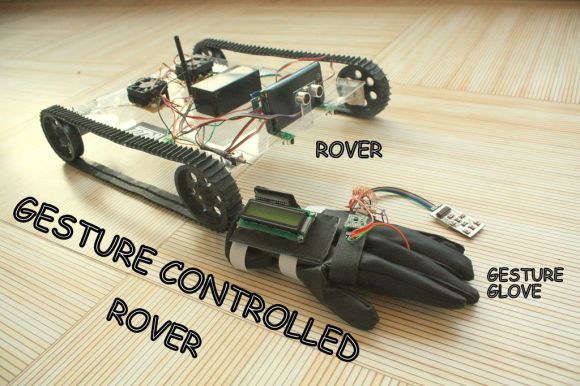
This homemade glove and gesture controlled rover was created by [electro18]. It can send temperature, battery level, and object distance to the LCD panel on the wrist. Instead of a typical joystick, this wireless system taps into an embedded accelerometer to maneuver the robot like magic.
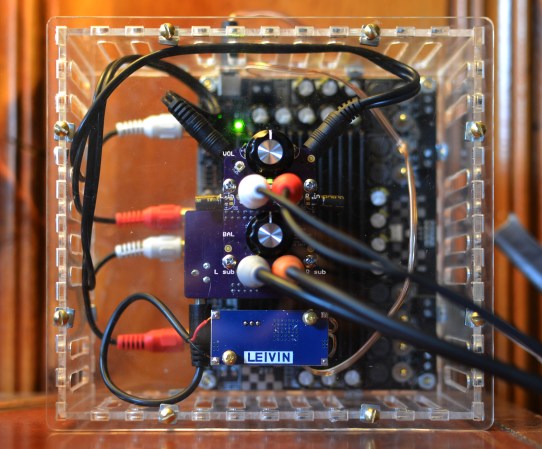
The main chassis platform is made of clear acrylic and has additional acrylic strips fixed to the edges for additional strength. A LM35 temperature sensor is wired to the front that monitors the environments that the rover explores. An HC-SR04 Ultrasonic Rangefinder acts as the eyes of the machine. The photodiode is covered with an adaptation of a 6mm heat shrink tube to avoid false readings. Once hooked up and turned on, the robot can be controlled with the futuristic power glove consisting of two parts. An accelerometer strap and a display strap are the biggest parts. The project shows that it is relatively easy to make a system like this. Other items like quadcopters and tiny water boats could be controlled with a similar type of setup.
A video of the axis glove maneuvering the vehicle on a slope can be seen after the break: