Winter in the parts of the Northern Hemisphere for which observing Christmas includes bringing half a forest into the house should really be divided into two seasons. No-spruce-needles-in-the-carpet season, and spruce-needles-doggedly-clinging-to-the-carpet season. Evergreen trees were not designed for indoor use, and for a hapless householder to stand any chance of keeping those needles on the branches there has to be a significant amount of attention paid to the level of the water keeping the tree hydrated.
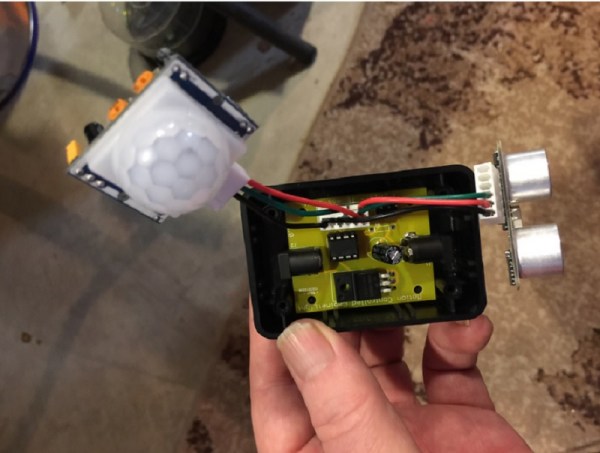
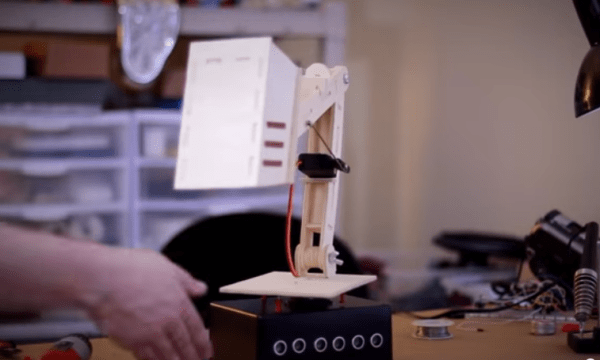
[Evan] has paid that attention to the problem of Christmas tree hydration, and to address the shortcomings of earlier designs has come up with a low water warning using an ultrasonic rangefinder. Where previous sensor attempts based on conductive probes succumbed to corrosion or dirt build-up, this one has no contact between sensor and water.
Behind the rangefinder is a CHIP board, whose software sends a text message to his phone when the water level gets a bit low. All the software is available in the linked GitHub page, so should you wish to make your tree safe from thirst, you too can give it a try.
SMS texts are a good way to alert a tree owner, but we quite like the sensor that used the tree lights instead.