Arguably, drones are one of the next big things that will revolutionize many industries. We’ve already seen them portrayed in many movies and TV shows in not-so-distant futures, and what with Amazon planning drone deliveries, we can’t imagine it’ll be long before they are a common sight flying around cities.
With a small group of people pushing the envelope and inventing every day.
Not for long though. DRL is making a huge push to turn this into a mainstream sport, and we gotta admit — we don’t mind. After all, this is like pod-racing on crack. Just take a look at the following promo video for their course the Gates of Hell: the Dream Takes Form.
Have any dead hard drives kicking around? Hackaday alum [Jeremy Cook] shows how easy it is to disassemble a hard drive to scavenge its goodies. The hardest part is having the patience and the tools to get past all those screws that stand between you and the treasure inside.
The case screws are frequently of the Torx variety. Any self-respecting hacker probably has one or two of these already, but if you’re in the market, [Jeremy] recommends a nice set that looks way better than ours. Once the case is open, you can find rare earth magnets, bearings, and one or more platters.
Those terrifically strong magnets are good for all kinds of projects. Glue a couple of them to the back of an attractive piece of wood, mount it on the kitchen wall, and you have yourself a knife block. Keep a couple on the bench to temporarily magnetize tools. Use them to build a pickup to amplify a cigar box guitar or thumb piano. Or run the pickup into a small amplified speaker and wave it like a stethoscope near your electronics to hear them hum. As far as liberating the magnets goes, [Jeremy] resorted to clamping his in a vise and using a hammer and chisel to pry it away from the actuator hardware.
You’ve no doubt seen clocks made from old hard drives that were kept mostly intact. Many makers including [Jeremy] will extract the shiny platters to use as bases for clock faces and engrave the numbers, etch them, or glue them on. Those platters also make excellent chimes. Even if you just hang one platter off of a finger and tap it with a fingernail, it sounds really nice.
If simple chimes don’t really butter your muffin, there are all kinds of sonic projects for dead hard drives. How about making a microphone or speakers? Maybe an HDD MIDI controller or a synthesizer is more your speed. Speaking of synths, watch [Jeremy] take a hard drive apart to some sweet sounds after the break.
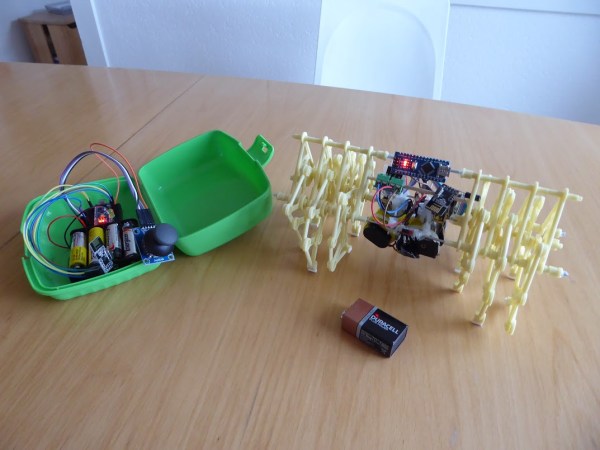
If you’ve never seen a Strandbeest before, you’re going to want to watch the video after the break. Invented by [Theo Jansen], a Strandbeest is a kinematic work of art. An eight legged structure that walks around under wind power — or if you’re clever, an Arduino and some motors.
For a weekend project, [Remet0n] decided to motorize a toy version of the Strandbeest, and make it remote-controlled. The toy is normally powered by a propeller spun by the wind — making it very easy to replace with motors. You can pick them up for under $10 on eBay.
Using an Arduino Nano, two small 3V motors , a wireless chip (NRF24L01) and a L9110 H-bridge, he was able to create this awesome little remote-controlled device:
Have you heard that Microsoft is testing underwater data centers? On the surface (well, actually on the ocean floor) it’s not a bad idea. Project Natick seals a node of servers in a steel pipe for an undersea adventure planned for at least 10 years. The primary reason is to utilize cold ocean temperatures to keep the machines cool as they crunch through your incessant Candy Crush Saga sessions.
Passive cooling is wonderful, and really drops the energy footprint of a data center, albeit a very small one which is being tested. Scaled up, I can think of another big impact: property taxes. Does anyone know what the law says about dropping a pod in the ocean? As far as I can tell, laying undersea cabling is expensive, but once installed there are no landlords holding out their hands for a monthly extraction. Rent aside, taking up space with windowless buildings sucking huge amounts of electricity isn’t going to win hearts and minds of the neighborhood. Undersea real estate make sense there too.
But it’s fun to play Devil’s Advocate, and this one immediately raised my eyebrow. I read as much Sci Fi as time allows, and am always interested to see which authors are registering the best technology predictions. This is the second time in short order that I turn to [William Hertling’s] work. Back in November, Google announced a project to add predictive responses to Gmail. This parallels the premise of [Hertling’s] Singularity Series which begins with Avogadro Corp. Another major point in that novel is the use of offshore data centers.
Unless you’re a collector or a hunter, waterfowl decoys are pretty boring. Radio controlled decoys that can putt around are kind of cool. But a radio controlled animatronic fire-breathing decoy? That’s the very opposite of boring.
This is another one of those projects from the “Why the Hell Not?” files, and [David Windestål] is pretty clear that there’s no practical purpose for a flame-throwing, floating fowl. This doesn’t stop him from including 100-plus pictures as well as the video below in his detailed build log, and there are actually some tips to be had here. The remains of an RC racing boat that can hit 30 km/h are used for the floating gear; sadly the decoy superstructure reduces the speed by a factor of 10, so if you’re hoping for a high-performance decoy you’ll be disappointed. The rotating head and evil glowing LED eyes make up for that, though, as does the articulated beak. But the butane flame thrower, with laser-cut acrylic frame and servo flow control, really adds to the menace of the Duck from Hell. Or goose. Whatever.
As with most projects of this type, this is clearly a “do not try this at home” build, but it looks like a bunch of fun. For more ill-advised fun check out this mini RC flame thrower or the Doof warrior ukulele.
Last weekend was Sparklecon, the premier meetup in Southern California of dorks dorking around, fire, electricity, welding, and general mischief. Just imagine a party of a hundred or so like-minded individuals at a hackerspace. Now imagine the entire party is the after party. That’s a pretty good idea of what happened.
The event was held at the 23b shop in Fullerton, a true hackerspace tucked away in a small industrial park. The people at 23b are using their location to their advantage: no one in the neighborhood really cares what happens after 5pm on a Friday. This allows for some very loud, very bright, and very dangerous hijinks.
There weren’t many pages missing from the Hackaday Omnibus donated to the 23b shop. Oddly, the only pages missing were the articles written by Benchoff.
There was something for everyone at Sparklecon, including:
Electric Pickle. Take a stick welder, and put a few hundred amps through a pickle. First, the pickle turns into a sodium light. Then, it turns into a carbon arc light. Best done after dark.
FPV drone racing. Flying around and crashing into trees in an abandoned lot. FPV from a few quads were projected onto the side of a building
Live music! Analog synths and Game Boys!
Tesla coils! This was a 300 amp monster, and completely analog. The spark gap was impressive by itself, but it gets really cool when you steal a fluorescent light from a fixture and stand 20 feet away from the Tesla coil.
Hammer Jenga! Cut some 2x4s up and make a tower of Jenga. Get a hammer, some colorful commentators, a dozen people, and make some competition brackets. Hackaday’s own [Jasmine] was the first champion of the night.
Sparklebot Death Battle! It’s like BattleBots, only things break more often and we don’t have [Bil Dwyer].
Hebocon! Battling robots, but much crappier than the Sparklebot Death Battle. These robots broke more often.
Analog synths provided the tunes
The Sparklebot Death Battle ring
Tesla Coils and Spark Gaps
A Hebocon bot, using a mouse trap as a weapon
A lady tribble, vibrating her way across the Hebocon ring
The basic premise of Hammer Jenga
Art was made out of the spare parts left over from the Hebocon build-off. This robot is named Art
The main event was, of course, Sparklecon’s own version of Battlebots. There were only four competitors the entire night, but the competition was fierce.
Three of the bots were wedge designs, in keeping with the ramp-ification of battling robots. The lone exception to this was [Charlie]’s Slow Bot, a cube design equipped with a spinning steel blade. The blade moves fast, but Slow Bot doesn’t. It’s a purely defensive design, meant to destroy bots trying for an easy kill. The test video of Slow Bot can be seen here:
The first fight of Slow Bot did not live up to the hype, unfortunately. After Slow Bot’s primary weapon got up to speed, the opposing bot moved in for the kill. The bolts on Slow Bot‘s blade sheared, ending the match, and leaving five or six people looking around the 23b shop for M5 bolts, or some larger bolts and a tap.
Is it all hilarously unsafe? Well, there were some plexiglas shields in front of the crowd, and most people viewed the fights on the projector beaming against the wall, anyway.
Is it worth it to go to Sparklecon? If you like dangerous experiments, soldering wires directly onto AA batteries, fire, electricity, electromagnetic fields, broken robots, and hanging out by a fire, yes. It’s a party at a proper hackerspace, making it the best kind of party ever. If history repeats itself, there will also be an afterparty at 23b following the LayerOne conference in May.
Sometimes there’s just no place like your desktop. You’ve already got your favorite development tools and references setup or installed and it’s a pain when you’re trying to work on an unfamiliar, or simply uncustomized, system. On your desktop everything is at your fingertips. If you want to search the web, the browser is just an alt-tab away. If you need a calculator, it’s right there to run. Your editor highlights syntax in your favorite colors already.
When developing on a Raspberry Pi, you leave all these creature comforts behind unless you spend the time to configure the Pi to your liking. Then it all gets wiped when you install a new distribution, like the recent change from Wheezy to Jessie. Even then it’s frustrating to switch back and forth between the desktop and the Pi because there is always something on the other system that you need. My usual comment is, “dirty word”, literally.
Cross-developing on your desktop is a very workable solution. We’re going to walk through setting up your desktop and a Pi to do this. This means loading a Pi ARM toolchain on your desktop and a debugging server on the Pi. This’ll let you develop and debug from in the comfort of your desktop. An added advantage is when you put that Pi in a robot you can debug over a wireless link.



 Passive cooling is wonderful, and really drops the energy footprint of a data center, albeit a very small one which is being tested. Scaled up, I can think of another big impact: property taxes. Does anyone know what the law says about dropping a pod in the ocean? As far as I can tell, laying undersea cabling is expensive, but once installed there are no landlords holding out their hands for a monthly extraction. Rent aside, taking up space with windowless buildings sucking huge amounts of electricity isn’t going to win hearts and minds of the neighborhood. Undersea real estate make sense there too.
Passive cooling is wonderful, and really drops the energy footprint of a data center, albeit a very small one which is being tested. Scaled up, I can think of another big impact: property taxes. Does anyone know what the law says about dropping a pod in the ocean? As far as I can tell, laying undersea cabling is expensive, but once installed there are no landlords holding out their hands for a monthly extraction. Rent aside, taking up space with windowless buildings sucking huge amounts of electricity isn’t going to win hearts and minds of the neighborhood. Undersea real estate make sense there too.