Early game consoles had a wide and interesting variety of controllers, many of which fell by the wayside as consoles evolved. One of these is the Atari 2600 paddle controller, which was the preferred interface for playing games like Kaboom!, Tempest, and Pong. While it is possible to play these games with a mouse, [Retro Gaming I Guess] wanted to do it the historically correct way, so he created a simple hack to convert an optical mouse into a paddle controller.
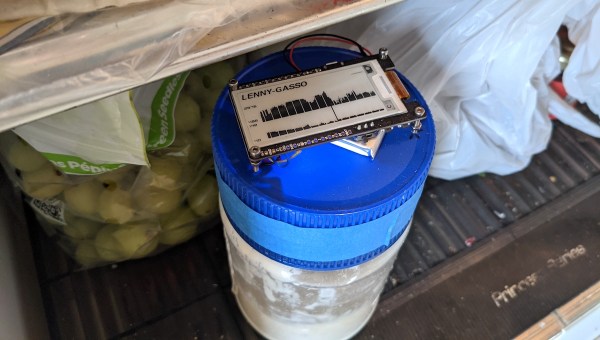
The main idea Is to attach a rotary knob to the bottom of the mouse, with the optical sensor located just inside the edge of the knob. To the optical sensor, it appears that the bottom surface of the knob is moving in a straight line, so the mouse pointer will move in a straight line as the knob rotates. The 3D printed knob (or bottle cap) is magnetically attached to the bottom of the mouse, by gluing one magnet into the center of the knob, and the other on the inside of the mouse under the PCB. This allows for quick conversion back to a normal mouse. You could off course sacrifice an old mouse to the cause to create a dedicated paddle controller, and make it closer to the original by adding end stops and a spring return.
We really like the simplicity of this hack, and we’re sure our readers can come up with a few other use cases for it in the comments below. You can also approach old Atari games from the opposite end, like adding a machine vision powered laser blaster. While many may think the Atari 2600 was the first gaming console, that honor actually goes to the Magnavox Odyssey, which was the start the of the multi-billion dollar home gaming industry we know today.