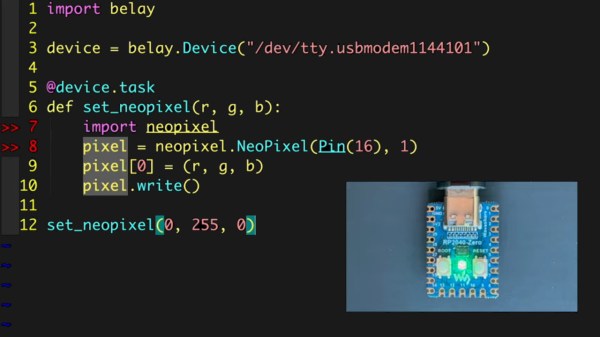
[Brian Pugh] has shared a cool new project that simultaneously runs on desktop Python and MicroPython – the Belay library. This library lets you control a MicroPython device seamlessly from your Python code – interacting with real-world things like analog/digital trinkets, servos, Neopixels and displays, without having to create your own firmware or APIs.
You need a serial-connected MicroPython board – even an ESP8266 should do. Then, you can intersperse your Python code with MicroPython-written functions, and call them whenever you need your connected device to do something – keeping the entire logic of your project within a single device. [Brian] provides quite a few examples, even for more complex things like displays. No doubt, there are limitations, but this looks to be a powerful tool in a hacker’s arsenal.
Readers might be reminded of an Arduino library called Firmata – an old-time way to do such connectivity. We’ve also previously covered a Pi Pico firmware that does a similar thing, and even features a breakout board for all your experimentation needs!
Continue reading “Your MicroPython Board Can Be Your Tinkering Peripheral”