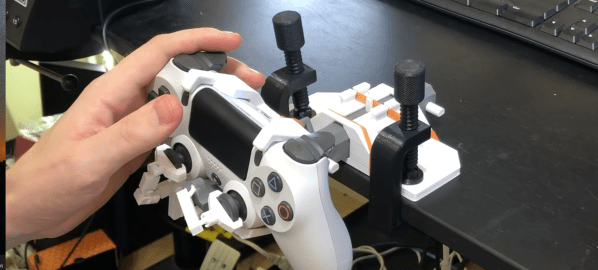
Every time manufacturers bring a new “unpickable” lock to market, amateur and professional locksmiths descend on the new product to prove them wrong. [Shane] from [Stuff Made Here] decided to try his hand at designing and building an unpickable lock, and found that particular rabbit hole to be a lot deeper than expected. (Video, embedded below.)
Most common pin tumbler locks can be picked thanks to slightly loose fits of the pins and tiny manufacturing defects. By lifting or bumping the pins while putting tension on the cylinder the pins can be made to bind one by one at the shear line. Once all the pins are bound in the correct position, it can be unlocked.
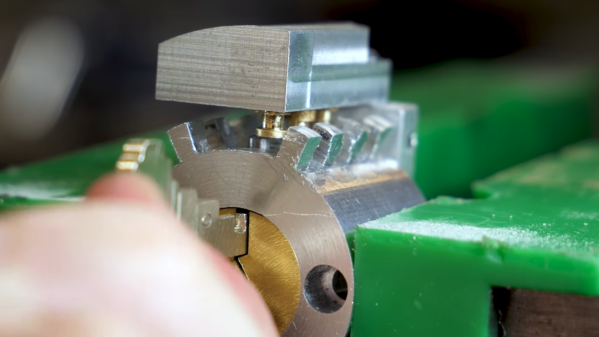
[Shane]’s design aimed to prevent the pins from being set in unlocked position one by one, by locking the all pins in whatever position they are set and preventing further manipulation when the cylinder is turned to test the combination. In theory this should prevent the person doing the picking from knowing if any of the pins were in the correct position, forcing them to take the difficult and time-consuming approach of simply trying different combinations.
[Shane] is no stranger to challenging projects, and this one was no different. Many of the parts had to be remade multiple times, even with his well-equipped home machine shop. The mechanism that holds the pins in the set position when the cylinder is rotated was especially difficult to get working reliably. He explicitly states that this lock is purely an educational exercise, and not commercially viable due to its mechanical complexity and difficult machining.
A local locksmith was unsuccessful in picking the lock with the standard techniques, but the real test is still to come. The name [LockPickingLawyer] has probably already come to mind for many readers. [Shane] has been in contact with him and will send him a lock to test after a few more refinements, and we look forward to seeing the results! Continue reading “Making A “Unpickable” Lock”