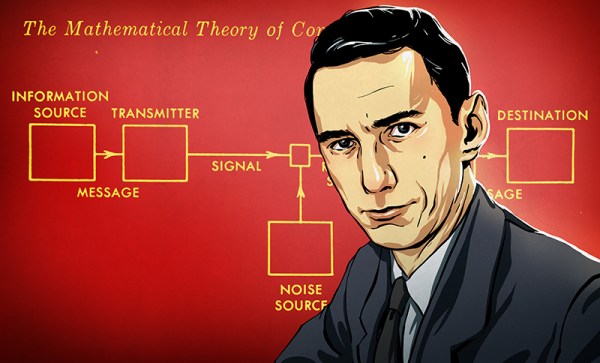
Dr. Claude E. Shannon was born 100 years ago tomorrow. He contributed greatly to the fields of engineering, communications, and computer science but is not a well known figure, even to those in the field. However, his work touches us all many times each day. The network which delivered this article to your computer or smartphone was designed upon important theories developed by Dr. Shannon.
Shannon was born and raised in Michigan. He graduated from the University of Michigan with degrees in Mathematics and Electrical Engineering. He continued his graduate studies at Massachusetts Institute of Technology (MIT) where he obtained his MS and PhD. He worked for Bell Laboratories on fire-control systems and cryptography during World War II and in 1956 he returned to MIT as a professor.
 Shannon’s first impactful contribution was his masters thesis which took the Boolean Algebra work of George Boole and applied it to switching circuits (then made up of relays). Before his work there was no formal basis for the analysis of switching systems, like telephone networks or elevator control systems. Shannon’s thesis developed the use of symbolic notation to represent networks and applied simplifying rules to optimize the system. These same rules later translated to vacuum tube and transistor logic aiding in the development of today’s computer systems. The thesis — A Symbolic Analysis of Relay and Switching Circuits — was completed in 1937 and subsequently published in 1938 in the Transactions of the American Institute of Electrical Engineers.
Shannon’s first impactful contribution was his masters thesis which took the Boolean Algebra work of George Boole and applied it to switching circuits (then made up of relays). Before his work there was no formal basis for the analysis of switching systems, like telephone networks or elevator control systems. Shannon’s thesis developed the use of symbolic notation to represent networks and applied simplifying rules to optimize the system. These same rules later translated to vacuum tube and transistor logic aiding in the development of today’s computer systems. The thesis — A Symbolic Analysis of Relay and Switching Circuits — was completed in 1937 and subsequently published in 1938 in the Transactions of the American Institute of Electrical Engineers.
Shannon’s doctoral work continued in the same vein of applying mathematics someplace new, this time to genetics. Vannevar Bush, his advisor, commented, “It occurred to me that, just as a special algebra had worked well in his hands on the theory of relays, another special algebra might conceivably handle some of the aspects of Mendelian heredity”. Shannon’s work again is revolutionary, providing a mathematical basis for population genetics. Unfortunately, it was a step further than geneticists of time could take. His work languished, although interest increased over time.
Continue reading “Centennial Birthday Of Claude E. Shannon The Math And EE Pioneer”








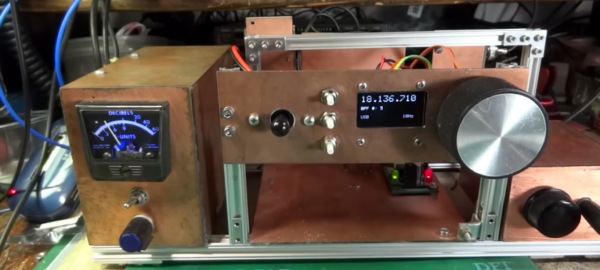
 [Tom] used a Teensy 3.1 Arduino compatible board, to control the Si5351
[Tom] used a Teensy 3.1 Arduino compatible board, to control the Si5351 









