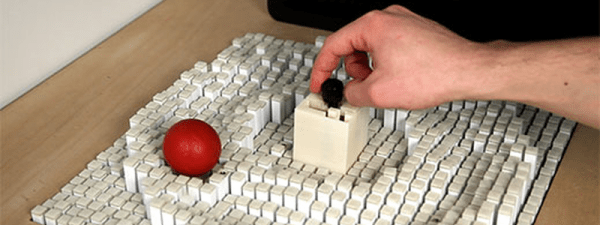
Remember pin art? That’s the little box full of pins that you can push something into and the pins take on the shape. You usually use your hand, but any small object works (including, if you are brave enough, your face). [Sean Follmer] (formerly at the MIT Media Lab) developed the reverse of this: a surface made of pins driven by motors. Under computer control, the surface can take on shapes all by itself.
The square pins can be seen in the video below moving and manipulating blocks and using them to build structures out of the blocks. By using the right sequence of pin motions, the blocks can be flipped and even stacked. Magnetic blocks offer even more options.