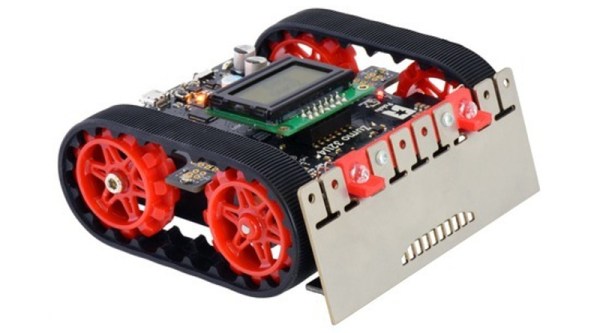
[David] over at Pololu programmed a mini-sumo robot, Zumo Red, with some extra smarts.
The basic rules of sumo robotics is exactly like human sumo – push your competitor out of the ring. [David]’s robot is special because it not only detects the competition border but measures the robot’s angle to the perimeter circle. Knowing the angle, [David]’s robot can turn and run for the center of the arena, the safest location. Once safe it can attack competitors from a symbolic high-ground. Unfortunately, the robot was a light weight in an already low weight class competition. It failed to push any competitors out of the ring and did not fare well in face-to-face battles. 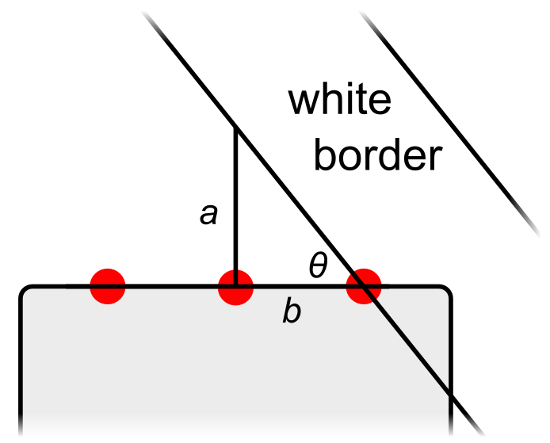
[David]’s bot uses a three LED line sensor, pretty common today for line following, to detect the boundary. As the ‘bot is moving an outer sensor will detect the border. It continues to drive forward until the middle sensor gets a hit. That provides the measurements need to calculate the angle. Neat and simple! Knowing the angle, the robot scoots to the center to plan its next attack.
[David’s] made the code for his bot’s brain, an Arduino compatible ATmega32U4, available so it will be interesting to see if the competition picks up on this trick.
Zumo Red meets Sumo Necko and a few more competitors in the video after the break.


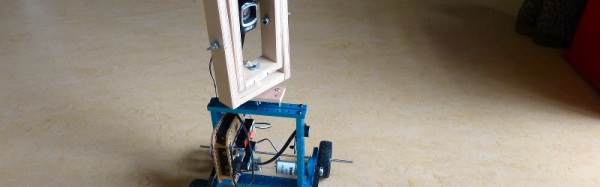
 The creator was asked to perform poems for a festival about transition and letting go. Naturally, building a robot to write poetry in sand was the downright obvious answer to the question.
The creator was asked to perform poems for a festival about transition and letting go. Naturally, building a robot to write poetry in sand was the downright obvious answer to the question.