When you think of a robot, you might think of one with wheels, tracks, or even legs. But today’s robots are as likely to have wings, props, or even some way to propel it through the water. If you are bored with quadcopters and want to build a water-going robot, you should check out Jalcboat, an open source robot/boat. Although the project is under development, the videos (see below) show that they’ve made a good bit of progress.
As you might expect, 3D printing is a key ingredient and the files are available on Thingiverse linked above. In addition, the robotic boat has a Raspberry Pi onboard to control brushless motors. The main web site is more of a discussion forum and some of it is in Spanish, so you might want to keep Google translate handy.
A well-designed robot can do any action a human can do. Whether this is an acrobatic performance, or just writing with a pen, there’s a robot out there for any single action a human can perform. This includes juggling, but never before has the human action of juggling been replicated at this scale. [Nathan] built a robot that can juggle seven balls simultaneously. That’s more balls in the air than any other juggling robot.
While the original plan was to build a low-cost version that could juggle balls by throwing them up in the air, this proved to be very difficult. Instead of giving up, [Nathan] simplified the problem by rolling the balls up a ramp. The entire build is documented in an imgur gallery, and there’s some interesting tech going on here. The 3D printed arms are controlled by beefy stepper motors running at 60V. To stop the balls from bouncing around in the arms, [Nathan] included and electromagnet to hold the balls in place for a fraction of a second during each cycle.
Juggling seven balls is amazing, but how about eight? This is the question every builder of a juggling robot will get, and it’s not quite as simple as adding another ball. The motion of juggling an even number of balls is completely different from juggling an odd number. That being said, [Nathan]’s robot does have four balls under its belt. It should probably get that looked at.
This isn’t [Nathan]’s first amazing 3D printed robot, and it probably won’t be the last, either: he recently built a Skittles sorting machine for the next time Van Halen comes to town. There’s an amazing amount of skill in all his projects, and he’s certainly an asset to the entire hackaday.io community.
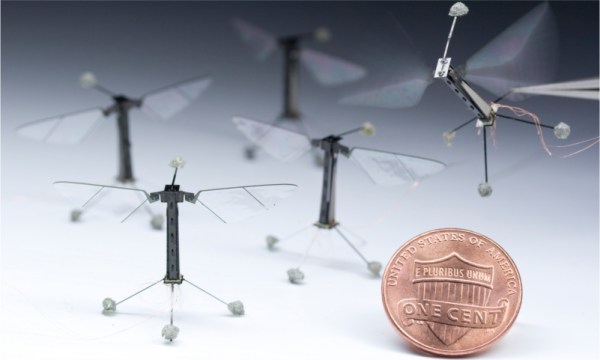
What do you call tiny flying robots that undoubtedly emit a buzzing noise as they pass by? Mosquitoes are universally hated, as are wasps, so the logical name is RoboBees.
This may not sound like much, but previously the robots lacked the ability to break the surface tension of water. To sink, the wings need a coating of surfactant. Once submerged, the bots lack the ability to transition back from water to air. But we won’t be surprised to see that ability added as a feature while the scope of the project continues to creep. So yes, you can jump into water to escape bees but not to escape Robobees.
Diving isn’t the only wonder to behold. The ‘head’ of the RoboBee is utterly fascinating. It’s constructed by folding the PCB into a pyramid like structure, 4 sides of the head include a photo-transistor covered by a diffused lens which the bot uses for self positioning by sensing changes between the bright light of the sky and absence thereof below the horizon. This concept is taken directly from biological self-righting systems found on the head of most insects, however Harvard’s version has one more sensor than the stock 3 seen on insects. Take that, nature!
NASA’s Jet Propulsion Laboratory (JPL) is working on a robot for the exploration of Europa’s oceans. A big problem is the oceans are under a permanent ice ceiling. JPL is making that ceiling a feature with a robot that dances, okay wheels, on the ceiling.
The Buoyant Rover for Under-Ice Exploration (BRUIE) is, as the name says, buoyant so it floats against the ice ceiling. Two large paddle wheels allow it to drive along the ceiling.
Andy Klesh from JPL with BRUIE
In 2012 they took an earlier version to Barrow, Alaska for testing under the ice. While the temperatures encountered there may not match those of Europa’s frozen methane [Europa is water, also – Rud] it’s still a challenging environment for man and robot. One of the challenges for the arctic exploration team was the need to test when the ice was thin enough to make a hole. They had to proceed judiciously to avoid falling in.
Recently they tested a newer version rover the California Science Center aquarium, giving new meaning to the phrase “swimming with the fishes.” Andy Klesh, principal investigator for the rover at JPL and volunteer diver at the science center accompanied BRUIE during the testing. Sometime in the future they hope to turn BRUIE loose in a lake where it can explore autonomously.
Fortunately the arctic team didn’t encounter any polar bears, another possible risk. When the rover makes it to Europa it’s unlikely to encounter an extra-terrestrial equivalent.
This is some seriously cool research. Scientists at the EPFL (Ecole Polytechnique Federale de Lausanne) have made tiny, tiny, tiny robots using shape memory alloys, or SMA’s for short. They weigh less than 4 grams and move like an inchworm!
Unlike regular robots that feature rigid structures and electric actuators, the researchers opted to take more of an origami like approach — so much so, they call it robogami. Their very first attempt was years ago, and was rather large. Since then they’ve shrunk it down to about the size of a compact flash card. The way it works is quite simple. SMA’s shrink when heated (either externally heated or by an internal current) and in doing so, produce extremely high forces.
So by patterning these in a shape (like that of an inchworm) the researchers are able to trigger each “limb” separately to induce movement. They can also jump seven times their height thanks to the super high power-density of SMA’s.
Fighting robots are even more awesome than regular robots. But it’s hard for us to imagine tossing all that money (not to mention blood, sweat and tears) into a bot and then watching it get shredded. The folks at Columbia Gadget Works, a Columbia, MO hackerspace had the solution: make the robots out of cardboard.
The coolest thing about building your robots out of cardboard and hot glue is that it’s cheap, but if they’re going to be a modest scale, they can still be fairly strong, quick to repair, and you’re probably going to be able to scrounge all the parts out after a brutal defeat. In short, it’s a great idea for a hackerspace event.
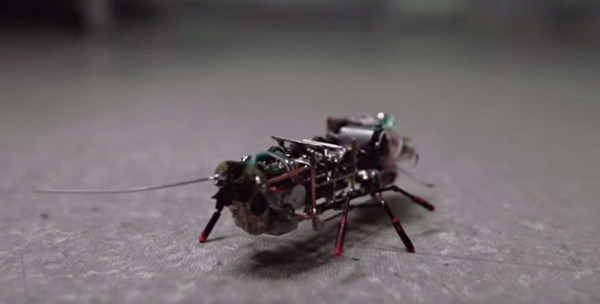
It’s name is Blaberus Cranifer, or Death’s Head for short. Light has now been shed on this once secret project built by the Immanuel Kant Baltic Federal University for a “vague” Russian organization. The little guy has a 20 minute battery life and can carry a 10 gram payload. Which comes in handy when you want to sneak a camera into hard to reach places. Other requirements were for it to look and behave like a real live insect.
It’s an impressive project considering it was built from scratch in only seven months time. Its intricate gears and other mechanical features would require the hands of a skilled watch maker to construct. Alternatively, one can control live insects such as controlling a roach’s brain or hooking up some radio controls to a live beetle. But building robotic insects is still pretty cool.
Be sure to check out the well made video detailing some of the project’s build process.


 While the original plan was to build a low-cost version that could juggle balls by throwing them up in the air, this proved to be very difficult. Instead of giving up, [Nathan] simplified the problem by rolling the balls up a ramp. The entire build
While the original plan was to build a low-cost version that could juggle balls by throwing them up in the air, this proved to be very difficult. Instead of giving up, [Nathan] simplified the problem by rolling the balls up a ramp. The entire build