The 2nd annual Omaha Mini Maker Faire wasn’t our first rodeo, but it was nonetheless a bit surprising . Before we even made it inside to pay our admission to the Omaha Children’s Museum, I took the opportunity to pet a Transylvanian Naked Neck chicken at one of the outdoor booths. The amiable fowl lives at City Sprouts, an Omaha community farming collective in its 20th year of operation. There seemed to be a theme of bootstrappy sustainability among the makers this year, and that’s great to see.
Just a few feet away sat a mustard-colored 1975 Chevy pickup with a food garden growing in its bed. This is Omaha’s truck farm, an initiative that seeks to educate the city’s kids in the ways of eating locally and growing food at home. On a carnivorous note, [Chad] from Cure Cooking showed my companion and me the correct way to dry-cure meats using time-honored methods.
LMR is possibly the most popular DIY robotics website around and was started up by a fun-loving Dane, [Frits Lyneborg]. It grew a large community around building up minimal robots that nonetheless had a lot of personality or pushed a new technical idea into the DIY robotics scene. [Frits] says that he hasn’t had time for DIY robotics for a while now, and doesn’t have the resources to run a gigantic web forum either, so he worked out a deal to let the Canadian hobbyist supply company Robot Shop take it over.
LMR has always been a little bit Wild-West, and many of the members quite opinionated, and that’s been part of its charm. So when the new corporate overlords came in, set up “Rules” (which have seemingly been downgraded to “suggestions”) and clarified the ownership of the content, some feathers were ruffled.
A few weeks later, everything looks to be settling back down again. (Edit: Or has it?!? See the comments below.) We wish LMR all the best — everyone loves robots, and LMR is a tremendous resource for the newbie interested in getting into DIY robotics on the cheap. More than a few LMR posts have been featured here at Hackaday over the years. Among our favorites are this drumming rover, a clever 3D printed gripper, and this wicked bicycle-style balancer.
Straight from the Max Planck Institute for Biological Cybernetics, and displayed at this year’s Driving Simulation Conference & Exhibition is the coolest looking simulation platform we’ve ever seen. It’s a spherical (or icosahedral) roll cage, attached to the corners of a building by cables. With the right kinematics and some very heavy-duty hardware, this simulation platform has three degrees of translation, three degrees of rotation, and thousands of people that want to drive a virtual car or pilot a virtual plane with this gigantic robot.
The Cable Robot Simulator uses electric winches attached to the corners of a giant room to propel a platform with 1.5g of acceleration. The platform can move back and forth, up and down, and to and fro, simulating what a race car driver would feel going around the track, or what a fighter pilot would feel barreling through the canyons of the Mojave. All you need for a true virtual reality system is an Oculus Rift, which the team has already tested with driving and flight simulation programs
An earlier project by the same research group accomplished a similar feat in 2013, but this full-motion robotic simulator was not made of cable-based robotics. The CyberMotion Simulator used a robotic arm with a cockpit of sorts attached to the end of the arm. Inside the cockpit, stereo projectors displayed a wide-angle view, much like what a VR display does. In terms of capability and ability to simulate different environments, the CyberMotion Simulator may be a little more advanced; the Cable Robot Simulator cannot rotate more than about sixty degrees, while the CyberMotion Simulator can turn you upside down.
The Cable Robot Simulator takes up a very large room, and requires some serious engineering – the cables are huge and the winches are very powerful. These facts don’t preclude this technology being used in the future, though, and hopefully this sort of tech will make its way into a few larger arcades.
There’s not much information about this commercial product, but it looks so interesting, we just had to share it. It doesn’t seem there is anything too magical happening here: some motors (presumably some type of servo or stepper with positioning feedback) some cables and pulleys, and an end effector of your choosing. Oh, and just some clever math to solve the inverse kinematics – not that inverse kinematics is all that easy! You can see the robot at work in the video after the break.
Most likely you’ve already seen the end results of such a three-dimensional cable driven system on your TV. If you’re a fan of most field sports, the SkyCam system is what’s used to deliver the stunning aerial shots that really put you into the game. We’ve covered this sort of mechanism before, but only in two dimensions. Usually we see the concept used as a white-board plotter like this extremely methodical Polargraph or one built with K’NEX.
We can’t help but wonder how this might be adapted into other situations? Perhaps, you could use small light-weight cables (fishing line) and pulleys to make a living-room beer delivery system or TV remote retrieval claw? Or could it become the mechanics of a really large format 3D printer? If any of you do rig up some sort of house-hold beverage fetching robot, be sure to let us know via the tipline.
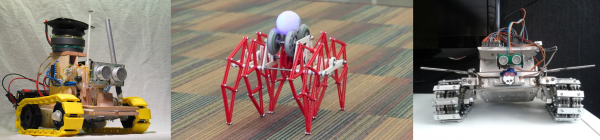
The SRR, as it’s called by the teams, is a two phase competition. In Phase 1 the robot must leave the starting platform, collect a pre-cached sample, and return the sample to the starting platform. Phase 2 is more difficult because the robot must not only collect the pre-cached sample but search a park for 9 additional samples. The park is a typical urban park about 1.5 football fields large with grass, trees, and park benches as obstacles.
The Mountaineers team robot is seen after picking up the pre-cached sample [Photo Credit: NASA/Joel Kowsky[Since the robots are supposed to be on celestial bodies lacking magnetic fields like Mars or the Moon, they cannot use a magnetometer (compass) or GPS satellites to determine their pose, i.e. orientation and location. Add to that handicap grueling time limits of 30 minutes for Phase 1 and 120 minutes for Phase 2 and you’ve got a huge challenge on your hands.
The Mountaineers, as they were known in the robot pits, are the only team to collect two samples during the competition. Another team from Los Angeles, Team Survey, was the first to complete Phase 1 in 2013, but only managed, in 2015, to collect the pre-cached sample during Phase 2.
All the teams who have competed are waiting to see if there will be a competition in 2016 and I am among them. After the break you’ll find a couple of videos of the 2015 competition. One is about the Mountaineers but the other us from NASA 360. If you look quickly during the opening sequence of the NASA 360 video you’ll see two small black robots. One is on its side spinning its wheels; the other jammed under a rock. Those are my rovers from the 2013 SRR. I’m chasing the dream of a winning extra-planetary rover and you should too!
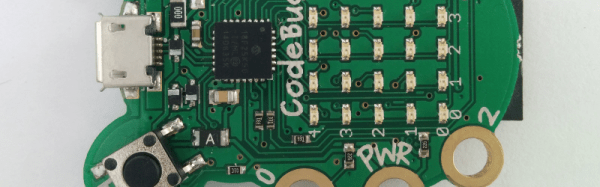
What has six legs, 25 LEDs, a Microchip CPU, can be sewn into clothing, and even plugged into a Raspberry Pi? The answer, it turns out, is the CodeBug–a low cost computer board aimed at the educational market. These board were crowdfunded and are now available for general purchase. [Mike Redrobe] took one of the boards, connected a few servos and used the CodeBug’s Scratch-like language to create a small robot.
You can see the robot in the video below. Programs download via USB (the board looks like a USB drive). You can also send commands over USB to operate in tether mode, or you can directly plug the board into a Raspberry Pi.
For [Lloyd T Cannon III]’s entry to the Hackaday Prize, he’s doing nothing less than changing the way everything moves. For the last 100 years, internal combustion engines have powered planes, trains, and automobiles, and only recently have people started looking at batteries and electric motors. With his supercapacitors and artificial muscles, [Lloyd] is a few decades ahead of everyone else.
There are two parts to [Lloyd]’s project, the first being the energy storage device. He’s building a Lithium Sulfur Silicon hybrid battery. Li-S-Si batteries have the promise to deliver up to 2000 Watt hours per kilogram of battery. For comparison, even advanced Lithium batteries top out around 2-300 Wh/kg. That’s nearly an order of magnitude difference, and while it’s a far way off from fossil fuels, it would vastly increase the range of electric vehicles and make many more technologies possible.
The other part of [Lloyd]’s project is artificial muscles. Engines aren’t terribly efficient, and electric motors are only good if you want to spin things. For robotics, muscles are needed, and [Lloyd] is building them out of fishing line. These muscles contract because of the resistive heating of a carbon fiber filament embedded in the muscle. It’s been done before, but this is the first project we’ve seen that replicates the technique in a garage lab.
Both parts of [Lloyd]’s project are worthy of a Hackaday Prize entry alone, but putting them together as one project more than meets the goal: to build something that matters.