The selfie: pop culture’s most frivolous form of self-expression is also probably one of the most human acts you could find yourself doing in a day. Everyone is guilty of snapping a quick pic from time to time with the expectation that it will leave an impression on those who see it. All of the implications surrounding why we do this support our deep-seated need to sculpt an identity for ourselves using others as the hammer and chisel. So, consider how upside-down the world would feel if you caught a robot posing for a shot in the mirror? What about one whose sole function was to take selfies and post them? If this breaks your mind a little, that was the intention. This #selfie robot by artists [Radamés Ajna] and [Thiago Hersan] is the first development in a larger body of work called “memememe”, which is meant to comment on our culture’s obsession with the trending, selfing nature of social media. This specific project explores the relationship between conversation and identity in a situation where there is no second party.
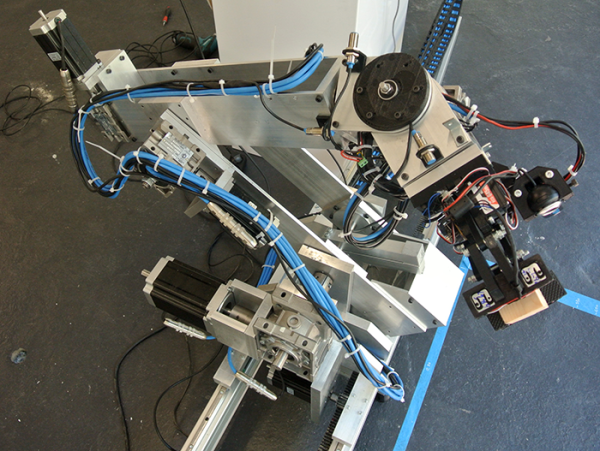
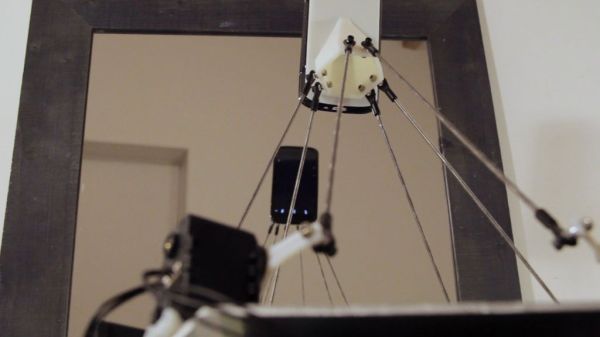
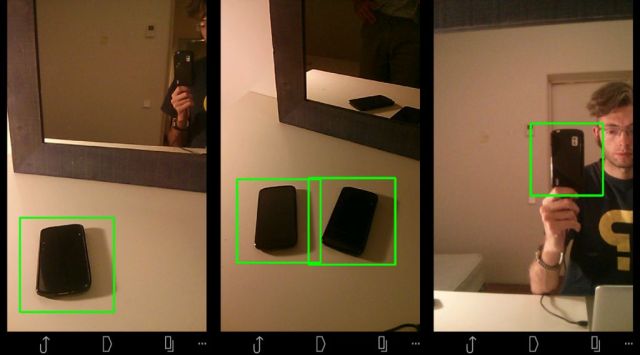 Hardware-wise, the #selfie bot is a Stewart platform made from six servo motors and a few pieces of carefully measured pushrod connected with swivel-ball-links. An android phone is mounted on the end effector which acts functionally as the robot’s face and eyes. To make it self-aware in a sense, [Ajna] and [Hersan] created their own recognition software with Open CV using a collection of sample images of various phones as reference points. As soon as the robot recognizes itself in the mirror as indicated by specific words flashing on its screen, it takes a picture, immediately uploading it to its own tumblr account. [Ajna] and [Hersan] have a nice description of their process on the project’s Instructable’s page which you can check out to see how they used Haar Cascades to create their custom object recognition. Additionally, if you’d fancy building your own robot to covertly place in your living room to snap pictures of other phones, you could check out their code on github.
Hardware-wise, the #selfie bot is a Stewart platform made from six servo motors and a few pieces of carefully measured pushrod connected with swivel-ball-links. An android phone is mounted on the end effector which acts functionally as the robot’s face and eyes. To make it self-aware in a sense, [Ajna] and [Hersan] created their own recognition software with Open CV using a collection of sample images of various phones as reference points. As soon as the robot recognizes itself in the mirror as indicated by specific words flashing on its screen, it takes a picture, immediately uploading it to its own tumblr account. [Ajna] and [Hersan] have a nice description of their process on the project’s Instructable’s page which you can check out to see how they used Haar Cascades to create their custom object recognition. Additionally, if you’d fancy building your own robot to covertly place in your living room to snap pictures of other phones, you could check out their code on github.
Watch it selfie :
Continue reading “Nothing’s As Vain As A Phone Taking A Selfie Of Itself… With Itself”

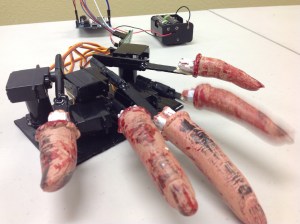 Impatient Severed Fingers – [Amanda] came up with a cute use for some mini servos and a zombie hand prop. The five severed fingers were attached to one end of a plastic rod. The other end was mounted to each of five servos which were laid out in the appropriate hand shape and attached to a fixed base. An Arduino running a basic sweep sketch animated the motors at slightly staggered intervals, creating a nice rolling effect. Even with the moving parts exposed this prop would be awesome to have on display, or set the ambiance with its continuous tapping…
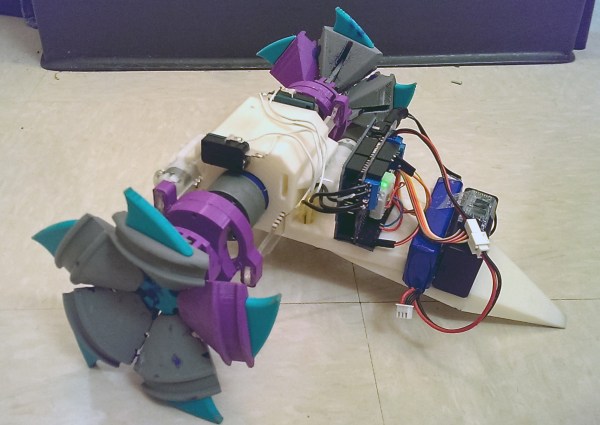
Impatient Severed Fingers – [Amanda] came up with a cute use for some mini servos and a zombie hand prop. The five severed fingers were attached to one end of a plastic rod. The other end was mounted to each of five servos which were laid out in the appropriate hand shape and attached to a fixed base. An Arduino running a basic sweep sketch animated the motors at slightly staggered intervals, creating a nice rolling effect. Even with the moving parts exposed this prop would be awesome to have on display, or set the ambiance with its continuous tapping… Angry Spectral Delta – [Nathan Bryant] made an actual costume for his delta robot from Robot Army. By attaching a small plastic skull to the end effector and draping a tattered piece of fabric over the rest of the mechanism he effectively transformed the delta into a little ghost with a sassy personality. The head swiftly bobbed about, all while staying parallel to the table… until it intermittently came unhinged and hung limply, which was a nice added effect!
Angry Spectral Delta – [Nathan Bryant] made an actual costume for his delta robot from Robot Army. By attaching a small plastic skull to the end effector and draping a tattered piece of fabric over the rest of the mechanism he effectively transformed the delta into a little ghost with a sassy personality. The head swiftly bobbed about, all while staying parallel to the table… until it intermittently came unhinged and hung limply, which was a nice added effect! Robotic Exorcism Baby – This doll could turn its half skeleton, half baby face 180 degrees and then laugh at your fear. By attaching two servo motors together, [Jeremy] was able to create a pan and tilt mechanism which acted as the baby’s contorting neck and chattering jaw. The micro controller sending commands to the motors was hidden modestly under her dress.
Robotic Exorcism Baby – This doll could turn its half skeleton, half baby face 180 degrees and then laugh at your fear. By attaching two servo motors together, [Jeremy] was able to create a pan and tilt mechanism which acted as the baby’s contorting neck and chattering jaw. The micro controller sending commands to the motors was hidden modestly under her dress.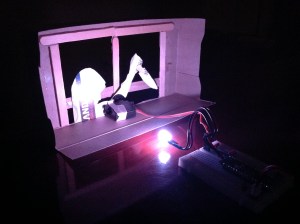 Stabby Animated Cardboard Shadowbox – Among the animatronic devices seen at the event was a shadowbox made by [Brandon] hidden in a dark conference room nearby. When one happened to walk past the seemingly unoccupied space, they’d glimpse the silhouette of an arm stabbing downward with a knife through a windowsill. Being lured in for further investigation you’d find that the shadow was being cast by some colored LEDs through a charmingly simple device. A cutout made from recycled card stock was attached to a single servo. This whole mechanism itself rocked back and forth slightly as the motor moved, which wasn’t intentional but added some realism to the motion of the stabby arm.
Stabby Animated Cardboard Shadowbox – Among the animatronic devices seen at the event was a shadowbox made by [Brandon] hidden in a dark conference room nearby. When one happened to walk past the seemingly unoccupied space, they’d glimpse the silhouette of an arm stabbing downward with a knife through a windowsill. Being lured in for further investigation you’d find that the shadow was being cast by some colored LEDs through a charmingly simple device. A cutout made from recycled card stock was attached to a single servo. This whole mechanism itself rocked back and forth slightly as the motor moved, which wasn’t intentional but added some realism to the motion of the stabby arm.
 Before the group arrived, the native dinos didn’t do much else than run a preprogrammed routine when triggered by someone’s presence… which needless to say, lacks the appropriate prehistoric dynamism. Seeing that their dated wag, wiggle, and roar response could use a fresh breath of flair, the park’s technical projects coordinator [Mark Butler] began adapting one of the dinosaur’s control boxes to work with a Raspberry Pi. This is when [Lucy] and her group were called upon for a two-day long excursion of play and development. With help and guidance from Raspberry Pi expert, [Neil Ford], the group learned how to use a ‘drag and build’ programing environment called
Before the group arrived, the native dinos didn’t do much else than run a preprogrammed routine when triggered by someone’s presence… which needless to say, lacks the appropriate prehistoric dynamism. Seeing that their dated wag, wiggle, and roar response could use a fresh breath of flair, the park’s technical projects coordinator [Mark Butler] began adapting one of the dinosaur’s control boxes to work with a Raspberry Pi. This is when [Lucy] and her group were called upon for a two-day long excursion of play and development. With help and guidance from Raspberry Pi expert, [Neil Ford], the group learned how to use a ‘drag and build’ programing environment called