It’s the stuff that Science Fiction is made of: an elevator that climbs its way into space rather than needing a rocket to get there. Can it be done? No. But this Kickstarter project aims to fund research that will eventually make a space elevator possible. They’re already way over their goal, and plan to use the extra funds to extend the reach of the experiments.
A complete success would be a tether that reaches into space, held taught by a weight which is pulled away from earth by centrifugal force. That’s not really on the radar yet (last we heard humans weren’t capable of producing a substance strong enough to keep the tether from snapping). What is in the works is a weather balloon supporting a ribbon which a robot can climb. The team isn’t new to this, having built and tested several models at University and then in a start-up company that closed its doors a few years ago. Now they’re hoping to get a 3-5 kilometer ribbon in the air and to build a new robot to climb it.
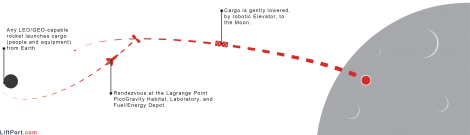
For now we’ll have to be satisfied with the 1000 ft. climb video after the break. But we hope to see an Earth-Moon freight system like the one shown in the diagram above before the end of our lifetimes.
Continue reading “Can A Kickstarter Project Actually Build A Space Elevator?”














