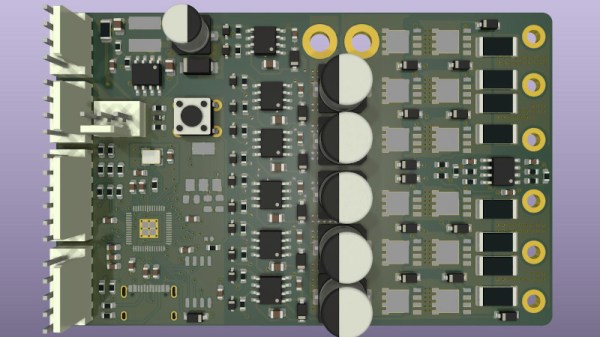
When the Raspberry Pi people launched their RP2040 microcontroller, it seemed as though it might be destined as a niche product for those areas in which the Pi has traditionally been strong. But during the global semiconductor shortage, it has remained almost alone among microcontrollers in having plenty of fab capacity to keep the supplies rolling. That, and its very vanilla set of ARM peripherals alongside those programmable state machines have thus seen it find a home in many places it might not otherwise have seen. Take the dual RP2040 motor controller from [Twisted Fields] as an example, would it have been more likely to have sported an STM32 in previous years?
It’s been produced as part of the Acorn Precision Farming Robot platform, and it’s a fully open-source two-channel controller on a board the same size as a credit card. The schematic appears fairly conventional through a cursory glance at the PDF, but we know from experience that motor controllers are never as deceptively simple to get right as their circuit would lead the unwary engineer to believe. The heat dissipation, current, and transient handling all play a part in a successful design, and we expect this one to evolve to fix any issues it might still contain.
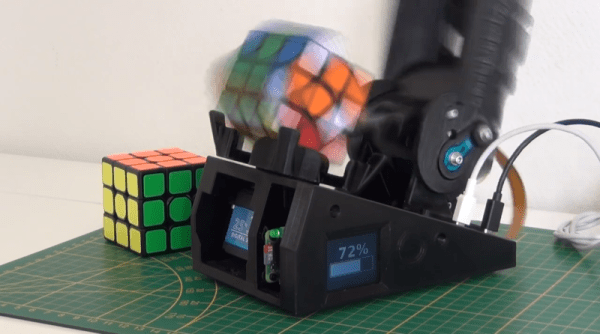
[AndreaFavero] says that the CuboTino emphasizes simplicity and cost-savings over speed. However, solving the puzzle in about 90 seconds is still better than we can do. The plucky solver uses a Pi and a camera to understand what the cube looks like and then runs it through a solver to determine how to move.
Watching the video below, we were impressed with the mechanics. The titled surface solves a few problems and makes manipulation easier. The way the mechanics are arranged, it only takes a pair of servos to flip the cube around as you like. Continue reading “Another Rubik’s Cube Robot Is Simple But Slow”→
When we think of robotics, the first thing that usually comes to mind for many of us is some sort of industrial arm that’s bolted to the floor, or perhaps a semi-autonomous rover trudging its way across the dusty Martian landscape. While these two environments are about as different as can be, the basic “rules” are pretty much the same. Being on firm ground ground gives the robot a clear understanding of its position and orientation, which greatly simplifies tasks such as avoiding collisions or interacting with nearby objects.
But what happens when that reference point goes away? How does a robot navigate when it’s flying through open space or hovering in mid-air? That’s just one of the problems that fascinates Nick Rehm, who stopped by to host this week’s Aerial Robotics Hack Chat to talk about his passion for flying robots. He’s currently an aerospace engineer at Johns Hopkins Applied Physics Laboratory, where he works on the unique challenges faced by autonomous flying vehicles such as the detection and avoidance of mid-air collisions, as well as the development of vertical take-off and landing (VTOL) systems. But before he had his Master’s in Aerospace Engineering and Rotorcraft, he got started the same way many of us did, by playing around with DIY projects.
In fact, regular Hackaday readers will likely recall seeing some of his impressive builds. His autonomous ekranoplan designed to follow a target using computer vision graced the front page in April. Back in 2020, we took a look at his recreation of SpaceX’s Starship prototype, which used a realistic arrangement of control surfaces and vectored thrust to perform the spacecraft’s signature “Belly Flop” maneuver — albeit with RC motors and propellers instead of rocket engines. But even before that, Nick recalls asking his mother for permission to pull apart a Wii controller so he could use its inertial measurement unit (IMU) in a wooden-framed tricopter he was working on.
Discussing some of these hobby builds leads the Chat towards Nick’s dRehmFlight project, a GPLv3 licensed flight control package that can run on relatively low-cost hardware, namely a Teensy 4.0 microcontroller paired with the GY-521 MPU6050 IMU. The project is designed to let hobbyists easily experiment with VTOL craft, specifically those that transition between vertical and horizontal flight profiles, and has powered the bulk of Nick’s own flying craft.
Moving onto more technical questions, Nick says one of the most difficult aspects when designing an autonomous flying vehicle is getting your constraints nailed down. What he means by that is having a clear goal of what the craft needs to do, and critically, how long it needs to do it. How far does the craft need to be able to fly? How fast? Does it need to loiter at the target location, and if so, for how long? The answers to these questions will largely dictate the form of the final vehicle, and are key to determining if it’s worth implementing the complexity of transitioning from VTOL to fixed-wing horizontal flight.
But according to Nick, the biggest challenge in aerial robotics is onboard state estimation. That is, the ability for the craft to know its position and orientation relative to the ground. While high-performance computers have gotten lighter and sensors have improved, he says there’s still no substitute for having a ground-based tracking system. He mentions that those fancy demonstrations you’ve seen with drones flying in formation and working collaboratively towards a task will almost certainly have an array of motion capture cameras tucked off to the side. This makes for an impressive show, but greatly limits the practical application of these drone swarms.
Nick’s custom Raspberry Pi 4-powered quadcopter lets him test autonomous flight techniques.
So what does the future of aerial robotics look like? Nick says open source projects like ArduPilot and PX4 are still great choices for hobbyists, but sees promise in newer platforms which pair the traditional autopilot with more onboard computing power, such as Auterion’s Skynode. More powerful flight controllers can enable techniques such as simultaneous localization and mapping (SLAM), which uses 3D scans of the environment to help the robot orient itself. He’s also very interested in technologies that enable autonomous flight in GPS-denied environments, which is critical for robotic craft that need to operate indoors or in situations where satellite navigation is unavailable or unreliable. In light of the incredible success of NASA’s Ingenuity helicopter, we imagine these techniques will also play an invaluable role in the future airborne exploration of Mars.
We want to thank Nick for hosting this week’s Aerial Robotics Hack Chat, which turned out to be one of the fastest hours in recent memory. His experience as both an avid hobbyist and a professional in the field provided exactly the sort of insight the Hackaday community looks for, and his gracious offer to keep in touch with several of those who attended the Chat to further discuss their projects speaks to how passionate he is about this topic. We expect to see great things from Nick going forward, and would love to have him join us again in the future to see what he’s been up to.
The Hack Chat is a weekly online chat session hosted by leading experts from all corners of the hardware hacking universe. It’s a great way for hackers connect in a fun and informal way, but if you can’t make it live, these overview posts as well as the transcripts posted to Hackaday.io make sure you don’t miss out.
Around here, we’re always excited about a new actuator design. Linear actuators are particularly hard to make cheap, fast, and good, so it’s even better when something new that we can build ourselves slides onto the scene.
Researchers at U Penn’s Pikul Research Group took inspiration from the cascade of falling dominoes for an innovative take on linear motion. This article on IEEE Spectrum describes the similarity of the sequential tipping-over with the peristaltic motion of biological systems, including you, swallowing right now.
The motion propagation in falling dominoes, called a Soliton Wave, can be harnessed to push an object at the front of the wave, just like a surfer. See the videos after the break for examples of simple setups that any of us could recreate with laser-cut or 3D printed parts. Maybe you won’t be using them to help a robot swallow (a terrifying idea that the article suggests), but you might need a conveyor or a novel way to help a device crawl like a shrimp. The paper is behind a paywall on IEEE, though you readers likely see enough in the videos to get started, and we can’t wait to see where your dominoes will lead us next.
With the summer months nearly upon us, many are dreaming of warm afternoons spent floating on a quiet lake. Unless you’re [Kolins] anyway. Apparently his idea of a good time is controlling a full-sized inflatable canoe not from onboard with a pair of oars, but from the shore with a RC transmitter.
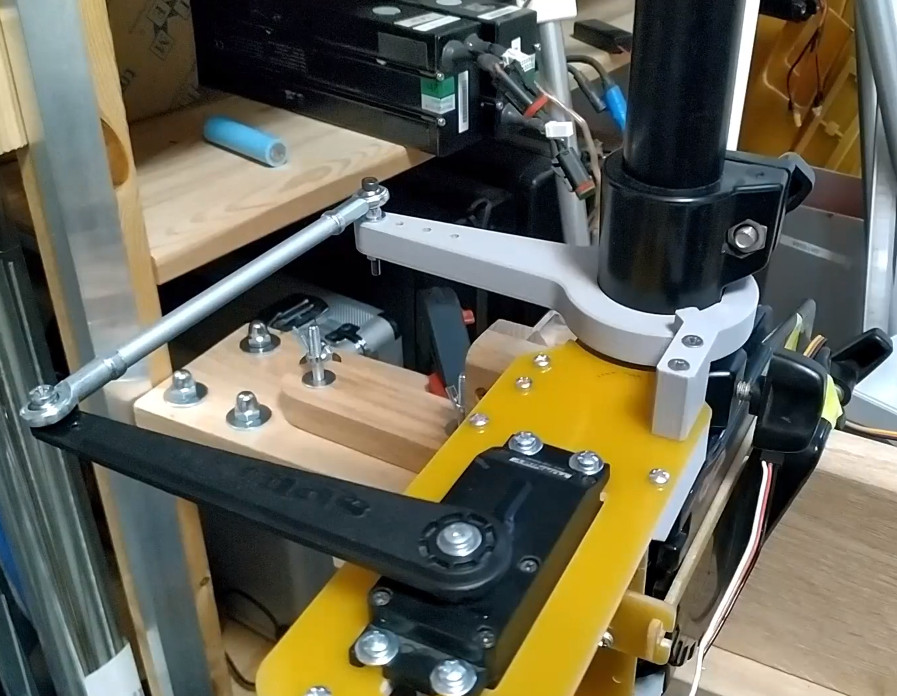
The linkage design allows the motor to be adjusted vertically.
Of course, as the video after the break shows, just because the canoe is powered by a remotely operated electric trolling motor doesn’t mean it can’t still carry human occupants. In fact, with the addition of a Matek F405-Wing flight controller running the rover variant of ArduPilot, the boat can even take you on a little tour of the lake while you kick back and relax.
We like that this project took the path of least resistance wherever possible. Rather than trying to spin up his own custom propulsion unit, and inevitably dealing with the challenge of waterproofing it, [Kolins] built his system around a commercial trolling motor. A clever servo mechanism physically turns the motor in much the same way a human operator would, while the speed is controlled with a suitably beefy ESC from Traxxas placed between the motor and its lead-acid battery.
It doesn’t look like there’s been any permanent mechanical or electrical changes made to the motor, which makes the whole thing a lot easier to replicate. We’ve talked in the past about the relative rarity of low-cost robotic watercraft, so a “bolt-on” propulsion module like this that can turn a cheap inflatable boat into an autonomous platform for research and experimentation is very interesting.
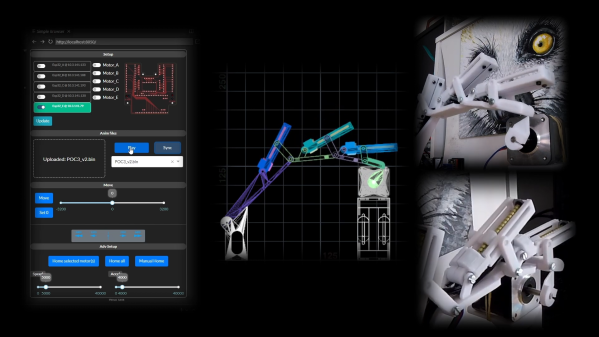
Robotic arms and actuators are compelling things to watch, and as popular among the maker set as they are crucial to modern industry. [kthod2000] built a design of their own, which relies on parts salvaged from old CD-ROM drives.
The arm itself is constructed of many components which appear to be 3D printed, with three main motors visible along its length. These look to be the eject motors harvested from several optical drives, which usefully come with a threaded screw on the output shaft that makes them perfect for a linear-drive application. Run by a TMC2208 driver via a microcontroller, the eject motors control the motion of several stages of the robot arm as it moves up and down.
The intention seems to be that one of these three-tiered assemblies could act as a single finger. Ganged up multiple times, this could allow the creation of something akin to a full five-digit robot hand. [kthod2000] has also done plenty of work on the software side of things that handles controlling the arm. The kinematics can all be simulated on screen in concert with the real motion of the arm.
We’ve seen similar builds before, too, like this plotter built out of scrap DVD drives. They’re a great source of quality electromechanical components for small projects, so it’s no surprise to see them put to work here. Video after the break.
Golf is a sport that has always enjoyed a good gadget or eight. Whether it’s something to measure the wind, or the latest putter guaranteed to save your game, golf enthusiasts have always flocked to such toys. [Nick O’Hara] has something that might just be a little too exciting for the golf set, though, in the form of his golf club launcher.
The golf club launcher essentially takes the role of a normal golf bag, with a rotating magazine containing all the necessary clubs for a day out on the green. The magazine is rotated into position on request, and the required club is launched out towards the player thanks to a pneumatic cylinder fired at 120 psi. A compressor in the base keeps the system charged with air for repeated launches.
The launcher even has a voice assistant built in. Telling the caddy the distance to the hole, and variables like wind and elevation, allows the device to select the right club for the conditions before blasting it towards the player.