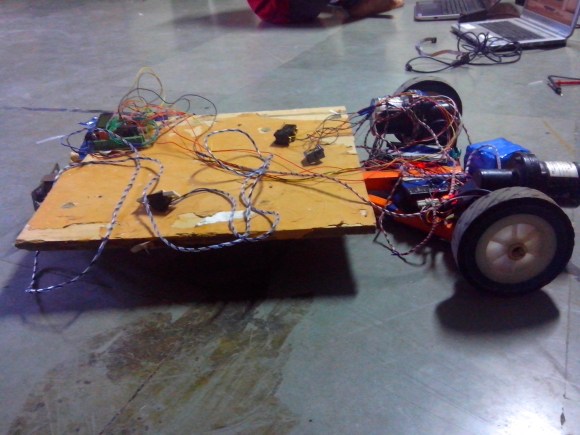
This rough-looking contraption is a hand gesture controlled skateboard which [Aditya] built using parts on hand. So far the sensor for hand gestures is connected by a control wire, but he hopes to transition to an RF unit at some point in the future.
Having access to a couple of high torque brushless motors is what turned him onto the project. He hit up a couple of Mechanical Engineer friends of his to help assemble the chassis and then started on the electronics side of things. A breakout board for an ATmega16 is mounted on the corner of the deck. It monitors an accelerometer which acts as steering as well as throttle. The accelerometer had been abused in a previous project so he had to add an extra switch to bolster his available inputs. We were glad to hear that he also included a kill switch, since putting the control of those motors in the hands of a damaged accelerometer is a bit sketchy.
We remember seeing a similar trike design a few years back. That one powered a single rear wheel while this one powers two wheels and uses a caster for the third.