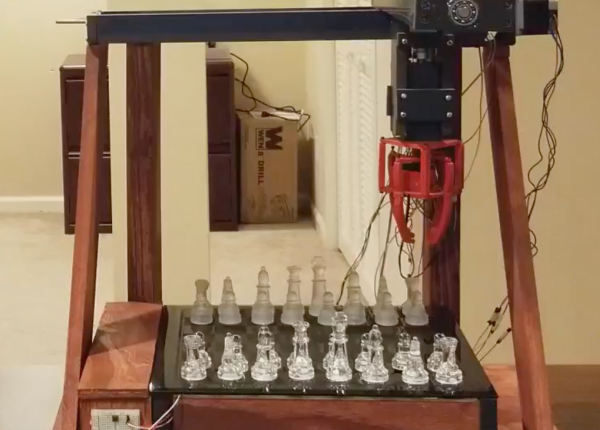
We have seen a number of self-playing chess boards over the years, but the general theme has been standard chess pieces moved by either an internal electromagnet or an external robotic arm. This is, of course, a reasonable choice, as it reduces complexity, and sometimes you can even use standard chess pieces on a regular board. But what if each piece could move by itself? That seems cooler, so that’s what [3DprintedLife] did with 3D-printed chess pieces that are also tiny robots.
Although technically not the first, as you can buy the commercial Chessnut Move offering, this being an open hardware and source project makes it a lot more interesting, also because the general design is generic enough to be usable for applications other than just playing chess.
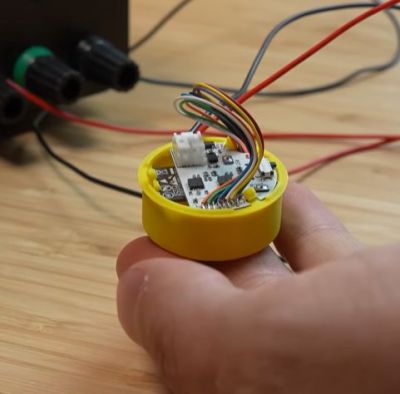
The MiniBots, as the individual pieces are called, are built around a custom PCB with an ESP32-C3 module, two PMO8-2 miniature stepper motors with requisite drivers, a magnetometer, and are powered by a 170 mAh LiPo battery. Communication with the central hub is done using ESP-NOW, with each MiniBot using its own dedicated channel.
This hub’s mainboard also runs on an ESP32-C3 for the wireless interface, while the processing is handled via a serial link with a Raspberry Pi SBC that runs the main Python-based software. Localizing the individual pieces on the board is done by scanning electromagnets embedded in the board and using the readings from the individual magnetometers to triangulate the positions.
Although at the end of the video a basic prototype sort of works, the ESP32-C3, being a single-core MCU, tripped up the firmware, necessitating some changes that should be in the next update, along with power saving and easier recharging being issues to address.
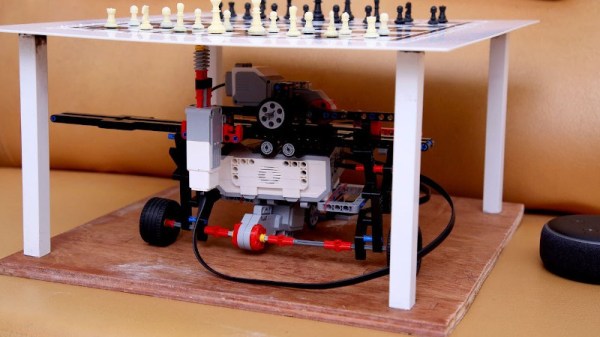
If you want to see a more conventional chess robot, we’ve seen plenty.
Continue reading “Robot Chess But Each Piece Is A Small Robot”