We’d be entirely wrong to think that Fichertechnik is just a toy for kids. It’s also perfect for prototyping the control system of robots. [davidatfsg]’s recent entry in the Hackaday Prize, Delta Robot, shows how complex robotics can be implemented without the hardship of having to drill, cut, bolt together or weld components. The added bonus is that the machine can be completely disassembled non-destructively and rebuilt with a new and better design with little or no waste.
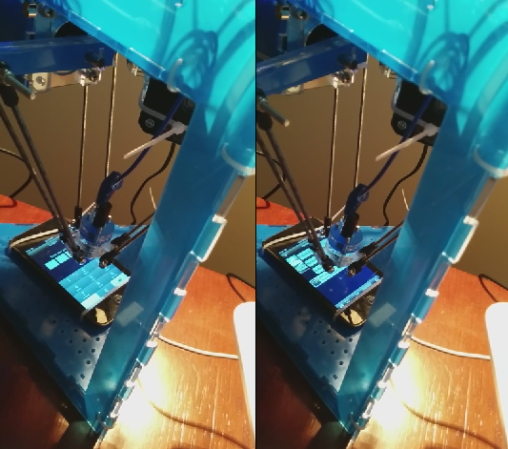
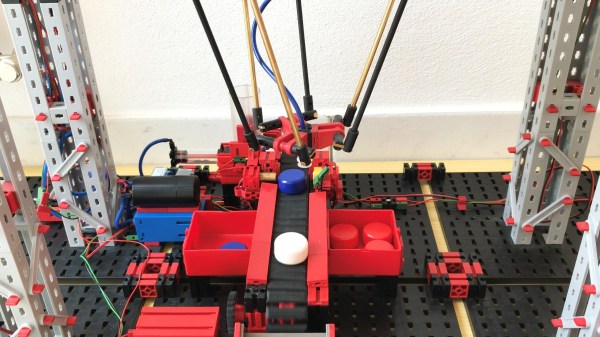
The project uses inverse kinematics running on an Arduino Mega to pick coloured objects off a moving conveyor belt and drop them in their respective bins. There’s also also an optical encoder for regulating the speed of the conveyor and a laser light beam for sensing that the object on the conveyor has reached the correct position to be picked.
Not every component is ‘off the shelf’. [davidatfsg] 3D printed a simple nozzle for the actual ‘pick’ and the vacuum required was generated by the clever use of a pair of pneumatic cylinders and solenoid operated air valves.
We’re pretty sure that this will not be the last project on Hackaday that uses Fischertechnik components and it’s the second one that [davidatfsg] has concocted. Videos of the machine working after the break! Continue reading “Pick And Place Robot Built With Fischertechnik”
 By now you’d think we’ve seen just about every means of robotic actuator possible. We have Cartesian bots, Stewart platforms, SCARA bots, Delta bots, and even
By now you’d think we’ve seen just about every means of robotic actuator possible. We have Cartesian bots, Stewart platforms, SCARA bots, Delta bots, and even