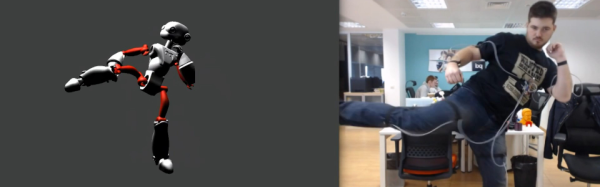
[Alvaro Ferrán Cifuentes] has built the coolest motion capture suit that we’ve seen outside of Hollywood. It’s based on tying a bunch of inertial measurement units (IMUs) to his body, sending the data to a computer, and doing some reasonably serious math. It’s nothing short of amazing, and entirely doable on a DIY budget. Check out the video below the break, and be amazed.
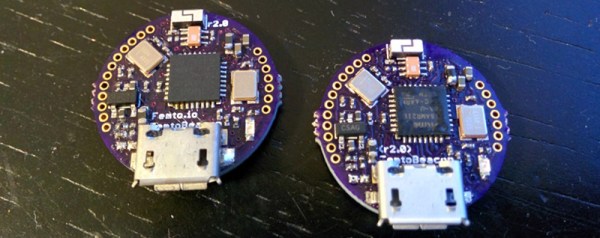
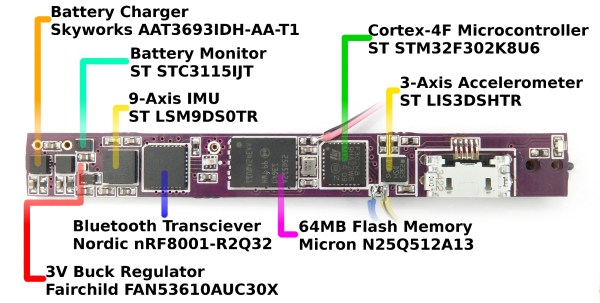
Cellphones all use IMUs to provide such useful functions as tap detection and screen rotation information. This means that they’ve become cheap. The ability to measure nine degrees of freedom on a tiny chip, for chicken scratch, pretty much made this development inevitable, as we suggested back in 2013 after seeing a one-armed proof-of-concept.
But [Alvaro] has gone above and beyond. Everything is open source and documented on his GitHun. An Arduino reads the sensor boards (over multiplexed I2C lines) that are strapped to his limbs, and send the data over Bluetooth to his computer. There, a Python script takes over and passes the data off to Blender which renders a 3D model to match, in real time.
All of this means that you could replicate this incredible project at home right now, on the cheap. We have no idea where this is heading, but it’s going to be cool.
Continue reading “Amazing IMU-based Motion Capture Suit Turns You Into A Cartoon”

 The project featured in this post is
The project featured in this post is