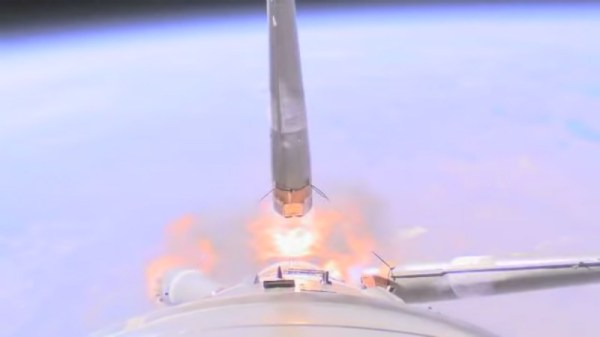
The failed launch of Soyuz MS-10 on October 11th, 2018 was a notable event for a number of reasons: it was the first serious incident on a manned Soyuz rocket in 35 years, it was the first time that particular high-altitude abort had ever been attempted, and most importantly it ended with the rescue of both crew members. To say it was a historic event is something of an understatement. As a counterpoint to the Challenger disaster it will be looked back on for decades as proof that robust launch abort systems and rigorous training for all contingencies can save lives.
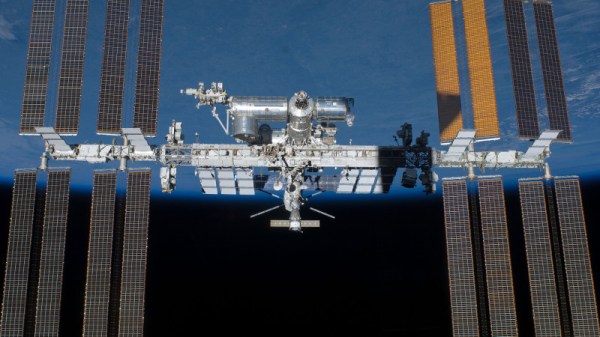
But even though the loss of MS-10 went as well as possibly could be expected, there’s still far reaching consequences for a missed flight to the International Space Station. The coming and going of visiting vehicles to the Station is a carefully orchestrated ballet, designed to fully utilize the up and down mass that each flight offers. Not only did the failure of MS-10 deprive the Station of two crew members and the experiments and supplies they were bringing with them, but also of a return trip which was to have brought various materials and hardware back to Earth.
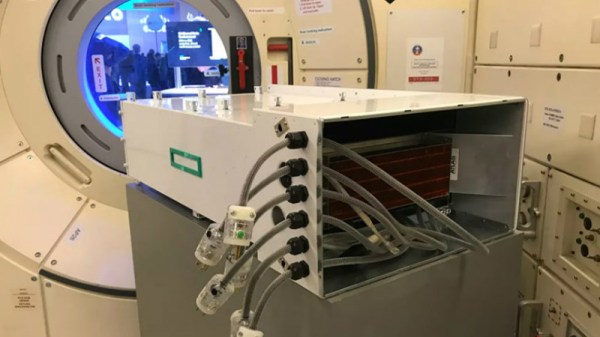
But there’s been at least one positive side effect of the return cargo schedule being pushed back. The “Spaceborne Computer”, developed by Hewlett Packard Enterprise (HPE) and NASA to test high-performance computing hardware in space, is getting an unexpected extension to its time on the Station. Launched in 2017, the diminutive 32 core supercomputer was only meant to perform self-tests and be brought back down for a full examination. But now that its ticket back home has been delayed for the foreseeable future, NASA is opening up the machine for other researchers to utilize, proving there’s no such thing as a free ride on the International Space Station.
Continue reading “The Space Station Has A Supercomputer Stowaway”