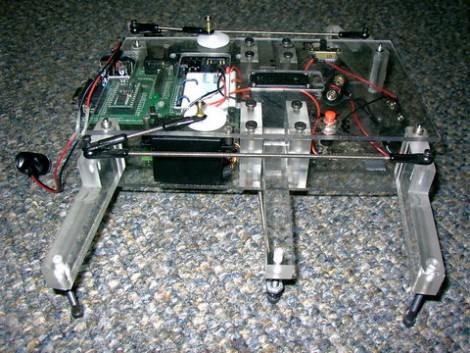
[Nulluser’s] Zipit was fine, but it couldn’t go anywhere on its own. Adding some motors and a microcontroller fixed that issue, and now he’s got a little robot called the Zipitbot. That’s a dsPIC board on top which communicates with the Zipit over an I2C bus. Four servo motors provide plenty of power to the wheels,with some extra battery packs nestled between them.
Since the Zipit is running Linux, and already has WiFi hardware, it’s not too hard to add Internet control. With this in mind there’s a webcam on the front to broadcast a video feed for use when controlling it remotely. See a couple of videos of this hack after the break.