
If you’ve been following [Joe Barnard]’s rocketry projects for the past few years, you’ll know that one of his primary goals has been to propulsively land a model rocket like SpaceX. Now, 7 years into the rollercoaster journey, he has finally achieved that goal with the latest version of his Scout rocket.

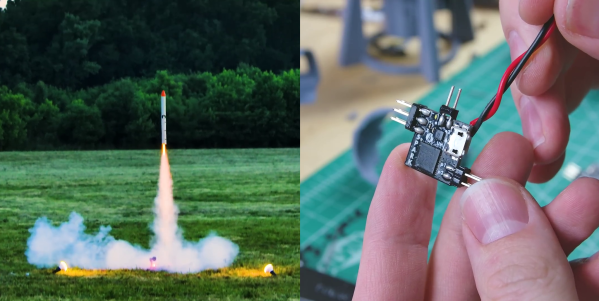
Many things need to come together to launch AND land a rocket on standard hobby-grade solid fuel rocket motors. A core component is stabilization of the rocket during the entire flight, which achieved using a thrust-vectoring control (TVC) mount for the rocket motors and a custom flight computer loaded with carefully tuned guidance software. Until recently, the TVC mounts were 3D printed, but [Joe] upgraded it to machined aluminum to eliminate as much flex and play as possible.
Since solid-fuel rockets can’t technically be throttled, [Joe] originally tried to time the ignition time of the descent motor in such a manner that it would burn out as the rocket touches down. The ignition time and exact thrust numbers simply weren’t repeatable enough, so in his 2020 landing attempts, he achieved some throttling effect by oscillating the TVC side to side, reducing the vertical thrust component. This eventually gave way to the final solution, a pair of ceramic pincers which block the thrust of the motors as required.
Another interesting component is the landing legs. Made from light carbon fiber rods, they are released by melting a rubber band with nichrome wire and fold into place under spring tension. They also had to be carefully refined to absorb as much impact as possible without bouncing, which killed a few previous landing attempts.
Scrolling back through [Joe]’s videos and seeing the progress in his engineering is absolutely inspiring, and we look forward to his future plans. These include a functional scale model of the belly-flopping starship, a mysterious “meat rocket”, and the big one, a space shot to exceed 100 km altitude.
Continue reading “BPS.Space Succesfully Lands A Model Rocket”






 [Joe Barnard] recently had
[Joe Barnard] recently had 









