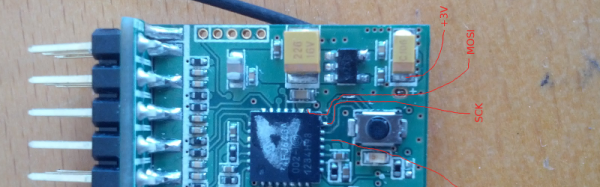
Many modern radio control (RC) systems use frequency hopping to prevent interference. Unfortunately, hopping all over the 2.4GHz band can interfere with video or WiFi using the same frequency band. [Befinitiv] was trying to solve this problem when he realized that most of the systems used a TI CC2500 chip and a microcontroller. The microcontroller commands the chip via SPI and controls the frequency by writing into a frequency register.
Updating the microcontroller firmware was impractical. The firmware is encrypted, for one thing. In addition, the change would have to be reinserted on any future updates and repeated for every RC vendor. So [Befinitiv] took a different approach. He did a classic man in the middle attack by inserting an CPLD in between the controller and the CC2500.
Once upon a time, the aspiring nerdling’s gift of choice was the Gilbert chemistry set. Its tiny vials of reagents, rack of test tubes, and instruction book promised endless intellectual stimulation and the possibility of stink bombs on demand. Now a new genetic engineering lab-in-a-box Kickstarter, with all the tools and materials needed to create your own transgenic organisms, may help the young biohacker’s dreams come true.
The Kickstarter has been wildly successful. The initial goal was $1200AUD was met in a day, and currently stands at almost $6200AUD. Despite that success, color me skeptical on this one. Having done way more than my fair share of gene splicing, there seem to be a few critical gaps in this kit. For example, the list of materials for the full kit includes BL21 competent E. coli as the host strain. Those cells are designed to become porous to extracellular DNA when treated with calcium chloride and provided with a heat shock of 42°C. At a minimum I’d think they’d include a thermometer so you can control the heat shock process. Plenty of other steps also need fairly precise incubations, like the digestion and ligation steps needed to get your gene into the host. And exactly what technique you’d be using to harvest DNA from the animal, plant or fungal cells is unclear; the fact that most of the techniques for doing so require special techniques leads me to believe there’s a lot less here than meets the eye.
To be fair, I’ve been off the lab bench for the better part of two decades, and the state of the art has no doubt advanced in that time. There could very well be techniques I’m not familiar with that make the various steps needed to transform a bacterial culture with foreign DNA trivial. It could also be the case that the techniques I used in the lab were optimized for yield and for precise data, while the GlowGene kit provides the materials to get a “good enough” result. I hope so, because a kit like this could really expand the horizons of hackerdom and start getting the biohacking movement going.
It is amazing how quickly you get used to a car that starts as long as you have the key somewhere on your person. When you switch vehicles, it becomes a nuisance to fish the key out and insert it into the ignition. Biometrics aims to make it even easier. Why carry around a key (or an access card), if a computer can uniquely identify you?
[Alexis Ospitia] wanted to experiment with vein matching biometrics and had good results with a Raspberry Pi, a web cam, and a custom IR illumination system. Apparently, hemoglobin is a good IR reflector and the pattern of veins in your hand is as unique as other biometrics (like fingerprints, ear prints, and retina vein patterns). [Alexis’] post is in Spanish, but Google Translate does a fine job as soon as you realize that it thinks “fingerprint” is “footprint.” The software uses OpenCV, but we’ve seen the same thing done in MATLAB (see the video below).
You’re working away busily at your project. A pcb here cabled to a breadboard in the middle, and over there some motors and other devices. It should work but it doesn’t. Time to hook-up the multimeter but the test point is on the other side. As things are moved around to reach the point, the magic smoke escapes from a critical component. Should have put those pliers away.
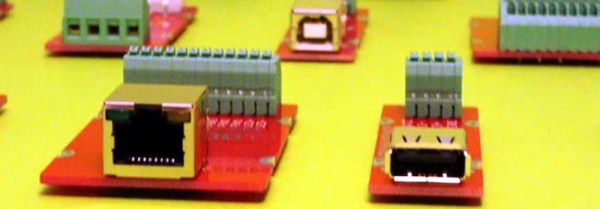
Workbenches are always messy. [Ryan Clark] may have an idea that can help. His Jigmod system — currently running a kickstarter campaign — uses an acrylic a polycarbonate sheet with a grid of mounting holes to keep prototyping hardware in place. If you need to move the prototype around there is no strain on the wiring and no way to set a circuit down on that pair of pliers. The positioning of everything is your decision.
[Ryan] is also providing breakout type boards for connectors like USB and Ethernet, switches, battery holders, and other typical components. This is one place where the system really shines. A lot of these interface connectors tend to be breadboard-unfriendly and the terminal blocks these modules offer solves those issues. When you need to demonstrate your project it’s easy to transport since everything is attached to the plate. No more disconnecting cables, especially jumper wires, and hoping you get them all hooked back the right way at the destination.
With so many dev boards out there we really enjoy seeing jigs that can hold them along with a breadboard. This Stickvise-inspired 3D printed jig sticks out in our minds as a favorite. Do you have your own system of organizing your prototype builds? We’d love to hear about it in the comments!
A while ago, [Joshua Young] had a conversation with an environmental scientist. There aren’t many government-funded pollution monitoring stations around Texas, but there are a lot of well-off home owners associations in Houston that have the sensors to collect the data. Air quality monitoring is important, and more data is usually better, and without these HOA’s providing the data for free, these environmental scientists wouldn’t have the data to do their job.
The system [Joshua] is building uses a suite of air quality sensors to measure sulfur dioxide, carbon monoxide, nitrogen oxides, ozone and particulate matter. These sensors connect to the Internet through either an ESP8266 WiFi module or a LoRa radio module, push the data onto the cloud, and let the entire world know what the air quality is.
Using tens of thousands of individual base stations to gather data has been done before; Weather Underground uses ten times as many weather stations than the National Weather Service to get better weather tracking resolution. Pollution sensors aren’t normally a part of a weather station, and with [Joshua]’s project, the environmental scientists tracking this data will hopefully get the data they need.
Ever heard of a Lichtenberg Figure? It’s the branching electrical discharge you can sometimes see on an insulating material… That’s right — when the voltage is high enough — it’ll find a way. Using one of our favorite low-cost high voltage transformers from a microwave, [TheBackYardScientist] shows us how to make our own Lichtenberg Figures!
It’s actually pretty easy. All you need is an old microwave, some plywood, and water with baking soda mixed in. First, you’ll need to take the transformer out of the microwave — a simple hack we’ve covered many times before — you’ll need to wire it in a way that allows you to get a few thousand volts out of it.
Then by mixing baking soda in water, you can increase the conductivity — let the wood soak it up overnight, and now you’re ready to go! By attaching the leads to either side of the wood, it’s now conductive enough to allow the electricity to branch across the wood, burning awesome patterns as it goes — just take a look at the following video!
The SRR, as it’s called by the teams, is a two phase competition. In Phase 1 the robot must leave the starting platform, collect a pre-cached sample, and return the sample to the starting platform. Phase 2 is more difficult because the robot must not only collect the pre-cached sample but search a park for 9 additional samples. The park is a typical urban park about 1.5 football fields large with grass, trees, and park benches as obstacles.
The Mountaineers team robot is seen after picking up the pre-cached sample [Photo Credit: NASA/Joel Kowsky[Since the robots are supposed to be on celestial bodies lacking magnetic fields like Mars or the Moon, they cannot use a magnetometer (compass) or GPS satellites to determine their pose, i.e. orientation and location. Add to that handicap grueling time limits of 30 minutes for Phase 1 and 120 minutes for Phase 2 and you’ve got a huge challenge on your hands.
The Mountaineers, as they were known in the robot pits, are the only team to collect two samples during the competition. Another team from Los Angeles, Team Survey, was the first to complete Phase 1 in 2013, but only managed, in 2015, to collect the pre-cached sample during Phase 2.
All the teams who have competed are waiting to see if there will be a competition in 2016 and I am among them. After the break you’ll find a couple of videos of the 2015 competition. One is about the Mountaineers but the other us from NASA 360. If you look quickly during the opening sequence of the NASA 360 video you’ll see two small black robots. One is on its side spinning its wheels; the other jammed under a rock. Those are my rovers from the 2013 SRR. I’m chasing the dream of a winning extra-planetary rover and you should too!