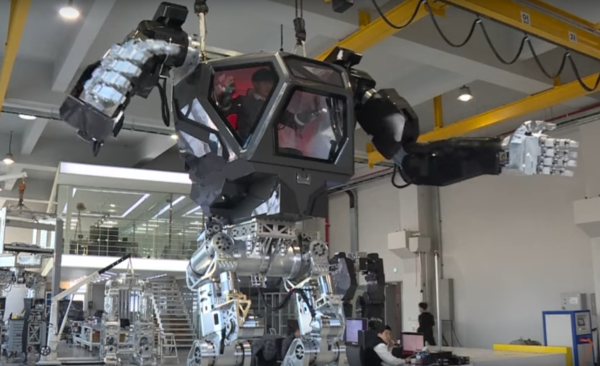
Well, that’s it. If SkyNet goes live once this 4-meter tall Avatar-style mech suit is in production, we’re all doomed.
Named [Method-2], the bipedal giant towers over the engineers testing it at Korea’s Hankook Mirae Technology, where they appear to have done everything possible to make this thing look terrifyingly awesome. The first video below shows the mech with a pilot on board, putting the arms through their paces. We count at least six degrees of freedom on each arm, not including the five digits on each hand that look like they could punch through a brick wall. Later in the video we see a tethered walking test with no pilot, but we also found a webcam video that purports to be the first walk with a pilot. Either way, the 1.5-ton machine shakes the floor with every step.
This is still a development phase project, as evidenced by the fact that the mech seems to be getting its power from an umbilical. But this company has dumped a lot of money into this thing, and we’d bet they intend to capitalize on it. Once it can run untethered, though, watch out. Until then, we’ll settle for this mecha-baby costume.
Continue reading “Say Hello To Our New Robot Overlords” →